SISUKORD
Sissejuhatus. 1
1. Aktiivsed
ja passiivsed turvaseadmed. 3
1.1 Aktiivsed
turvaseadmed. 3
1.1.1 ABS
pidurisüsteem.. 4
1.1.2 Veojõukontroll 6
1.1.3 Stabiilsuskontroll 6
1.1.4 Pidurdusjõu
jaotussüsteem.. 9
1.1.5 Äkkpidurduse
süsteem.. 11
1.1.6 Sõiduraja
jälgimise süsteem.. 12
1.1.7 Öösõidu
abi süsteem.. 13
1.1.8 Liiklusõnnetuse
ennetamise süsteem.. 15
1.2 Passiivsed
turvaseadmed. 20
1.2.1 EuroNCAP. 20
1.2.2 Turvavöö. 23
a) ALR/ELR
turvavööd. 24
b) Turvavööde
eelpingutid ning pingepiirajad, aktiivsed ja „targad“ turvavööd. 25
c) Täispuhutavad
turvavööd. 29
d) Lastetoolide
Isofix ja LATCH kinnitused. 30
1.2.3 Turvapadjad. 33
a) Eesmised
turvapadjad. 34
b) Külgmised
turvapadjad ja turvakardinad. 38
c) Mootorrataste
turvapadjad. 42
1.2.4 Peatoed. 44
1.2.5 Energiat
„neelav“ kere konstruktsioon. 47
Kokkuvõte. 50
Kasutatud allikate loetelu. 53
Lisa 1. EuroNCAP`i ajalugu. 57
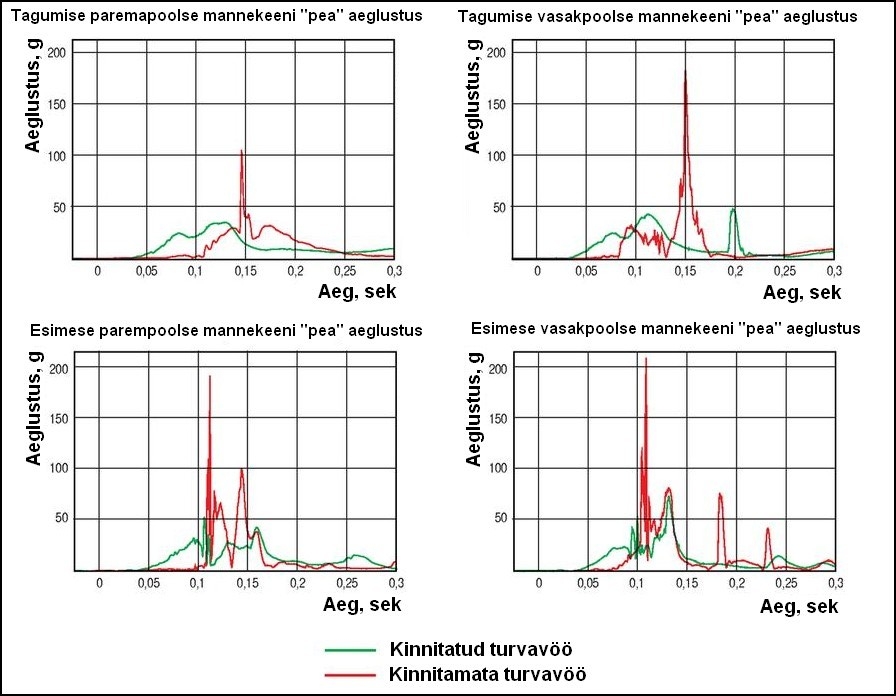
Lisa 2. Kinnitatud ja kinnitamata turvavöödega. 58
mannekeenide „peade“ aeglustuse võrdlus. 58
Alates Eesti taasiseseisvumisest on Eesti majandus jõudsalt kasvanud, mis
on kaasa toonud suure autopargi kasvu. Seisuga 01.01.2003 oli Eestis 486 182
registreeritud sõidukit, seisuga 01.01.2009 aga juba 639 472 sõidukit.
Ehk kuue aastaga kasvas sõidukite arv umbes 31,5%. Poole sajandi taguse ajaga
võrreldes on autode arv suurenenud 51,1 korda.
Kuid liikluses osalevate sõidukite arvu kasv tõi kaasa liiklusõnnetuste üldarvu
kasvu. Liiklusõnnetuste üldarvu kasv koos autopargi kasvuga on igati loogiline
ning paratamatu, kuid Eestis kasvas liiklusõnnetuste arv kiiremini kui
sõidukite arv.
Ehk Eesti liiklus on muutunud oluliselt ohtlikumaks. Nt 2009.a hukkus Eestis
liiklusõnnetustes 100 inimest ning 1919 inimest sai vigastada.
Kaasaaegsed sõidukid on ohtralt varustatud liiklusohutust suurendavate
või liiklusõnnetuse tagajärgi kergendavate seadmetega, kuid nende seadmete töö
efektiivsus on suures sõltuvuses sellest kui õigesti sõiduki kasutaja neid
kasutada või seadistada oskab. Käesoleva töö eesmärk on tutvustada lugejale selliste
süsteemide ning seadmete tööpõhimõtteid aitamaks tal neid õigesti kasutada. Töös
on kirjeldatud selliste süsteemide töötamise ja kasutamise üldiseid
põhimõtteid. Kuidas mõni töös kirjeldatud seade või süsteem täpselt töötab,
ning kas ja millised on selle kasutamise eripärad mõnel konkreetsel lugeja
sõidukil, seda peab lugeja uurima oma sõiduki kasutusjuhendist või pöördudes
sõiduki ametliku esindaja poole. Samuti on töös käsitletud ohutut sõitu inimfaktori
ehk sõidukijuhi seisukohalt, selgitades lugejale kui sõidukijuhile, kui oluline
on liiklusohutuse seisukohast sõidukijuhi õige tegutsemine ning liiklusesse
suhtumine.
Töös on autor
kasutanud numbrilist viitamist, kuid erinevalt Tallinna Tehnikakõrgkooli
kirjalike tööde vormistamise juhendis sätestatule, näitab viitenumber viite
järjekorda mitte ei viita kasutatud kirjanduse loetelus sama järjekorra numbri
all olevale allikale. Lehekülje alumises osas on vastava numbri järel toodud
kasutatud allika andmed lühendatud kujul mille alusel on võimalik töö lõpus
olevast kasutatud kirjanduse loetelust leida põhjalikud vastava allika andmed.
Selline viitamine on tingitud asjaolust, et töö autorile teadaolevalt ei
võimalda töö koostamisel kasutatud tarkvara „Microsoft Word 2002“ automaatset
viitamist muul kujul. Kui viite järjekorra number seisab:
a)
lause sees, viitab see sellele, et viide laieneb konkreetsele sõnale või
arvandmele;
b)
lause lõpus enne punkti, viitab see sellele, et viide laieneb vaid
sellele lausele;
c)
lause lõpus peale punkti, viitab see sellele, et viide kehtib lõigu
piires tagasiulatuvalt kuni esimese viite järjekorra numbrini või selle
puudumisel kuni lõigu alguseni;
d)
lause sees jutumärgi järel või lause lõpus jutumärgi järel kuid enne
punkti, viitab see sellele, et viide kehtib üksnes jutumärkides toodud tekstile
ja andmetele.
Mootorsõiduk on
kõrgendatud ohu allikas. Sõidukite mootorite võimsuse, sõidukite kiiruse ja
liiklustiheduse pidev kasv oluliselt suurendavad liiklusõnnetuse tekkimise
tõenäosust. Liiklusõnnetuse vältimiseks ning sõidukite reisijate kaitseks
liiklusõnnetuste korral, töötatakse pidevalt välja ja juurutatakse tehnilisi
lahendusi. Nii hakati 1949
aastal paigaldama autodesse turvavöösid, mis hoidsid reisijaid liiklusõnnetuse
korral oma kohtadel kinni. 1978.a.
oli esmakordselt sõidukile paigaldatud ABS pidurisüsteem (Mercedes-Benz
S klass). 1980.a.
oli esmakordselt seeriatootmises olevale sõidukitele paigaldatud turvapadi
(Mercedes-Benz S klass) mille tööpõhimõte oli sama mis tänapäeva turvapatjadel.
Tänapäeva sõidukid on varustatud nendega ning paljude muudega turvaseadmetega.
Kõiki turvaseadmeid on võimalik jaotada kahte suurde gruppi: aktiivsed ja
passiivsed turvaseadmed.
Aktiivseteks
liiklusohutust suurendavateks süsteemideks on süsteemid, mis aitavad vältida
liiklusõnnetust. Need süsteemid töötavad pidevalt või rakenduvad tavaliselt
sõiduki juhile märkamatult. Enimlevinud aktiivsed turvaseadmed on:
a)
ABS pidurisüsteem
b)
Veojõukontroll
c)
Stabiilsuskontroll
d)
Pidurdusjõu jaotussüsteem
e)
Äkkpidurduse süsteem
Lisaks nendele
on olemas palju abistavaid aktiivseid turvasüsteeme. Mõned neist on:
a)
Elektrooniline diferentsiaali lukk
b)
Parkimisabi
c)
Püsikiiruse hoidja
d)
Adaptiivne püsikiiruse hoidja
e)
Allamäge liikumise abisüsteem (Downhill Assist)
f)
Ülesmäge sõidu alustamise abisüsteem (Hill Start Assist)
g)
Elektrooniline käsipidur
h) Automaatne
käsipidur
Ilmselt võib esimeseks aktiivseks turvaseadmeks nimetada ABS pidurisüsteemi.
ABS on saksa keelse väljendi Anti Blockier System (blokeerumist vältiv süsteem) lühend. Inglise keelne variant
nimetusest on Anti-lock Brake System. Nagu süsteemi
nimetusest näha, on tegemist süsteemiga mis välistab rataste blokeerumist
pidurdamisel. Nagu eelpool mainitud oli, hakkas süsteemi seeriatoomises
esimesena kasutama Mercedes-Benz. Süsteemi
väljatöötamise vajaduse tingis asjaolu, et sõiduki piduri süsteemid olid sellel
ajal piisavalt võimsad, et äkkpidurdamisel blokeerida sõiduki kõik rattad
sõltumata rehvide haardejõu suurusest, ehk sõltumata sellest kas sõiduk liikus
parajasti kuival asfaldil või jääl. Kuid rataste (eriti juhtrataste) blokeerumisel
muutub sõiduk juhitamatuks ning tee peal tekkinud takistuseni piisava vahemaa puudumisel
puudub võimalus takistusele otsasõitu vältida. Sellises situatsioonis
(äkkpidurdamisel) rakendub tööle ABS pidurisüsteem, mis välistab rataste
blokeerumist ning võimaldab sõidukit juhtida (takistusest ümber põigata).
ABS pidurisüsteem sisaldab nii mehaanilisi kui ka elektroonilisi osi. Selle
pidurisüsteemi tööpõhimõtte seisneb selles, et igale rattale paigaldatud elektroonilised
andurid mõõdavad iga ratta pöörlemise ning pidurdamisel selle aeglustamise
kiirust. Anduritelt saadud andmete alusel tuvastab süsteem hetke millal mõni
ratas blokeeruma hakkab. Sellel hetkel edastab süsteemi juhtplokk
pidurisüsteemi hüdraulika pumbale käsu vähendada pidurivedeliku survet
pidurisüsteemis. Kirjeldatud protsess kordub mitukümmend korda sekundis ning tagab
rataste pidurdamise blokeerumise piiril.
Joonisel 1 on kajastatud kaasaegse ABS pidurisüsteemi ehitus.
ABS pidurisüsteemi eesmärk ei ole pidurdusteekonna lühendamine. Selle
peamine eesmärk on rataste blokeerumise vältimine ning selle kaudu sõiduki
juhitavuse säilitamine pidurdamisel. Lisaks sellele, et rataste blokeerumisel
ei ole võimalik takistuses mööda sõita, on rataste blokeerumine ohtlik ka selle
tõttu, et sõiduk võib sattuda külglibisemisse või libiseda vastassuuna
vööndisse. See võib juhtuda kui rataste all on erinev pinnas (nr asfalt ja
jää), sõidukil on erinevad rehvid või sõiduki telgede koormus on erinev. Samuti
blokeerunud ratastega muudab sõiduki suunda igasugune külgjõud (nt tee kallak
paremale või vasakule). Sellises situatsioonis on praktiliselt võimatu sõiduki
trajektoori muuta.
Kuna algaastatel olid ABS süsteemi osad väga suured, rasked ja kallid, ei
olnud võimalik neid mootorratastel massiliselt kasutada. Esimesena paigaldas
ABS pidurisüsteemi mootorrattale 1988. aastal BMW oma mudelile K100. Alastes
2000. aastast pakub BMW kõikidele oma mootorratastele ABS pidurisüsteemi.
Laialt hakkas ABS pidurisüsteem mootorratastel levima alles 21. sajandi alguses
ning massiliselt hakati seda paigaldama alates aastast 2005.
Joonis 1
ABS
pidurisüsteemi skeem
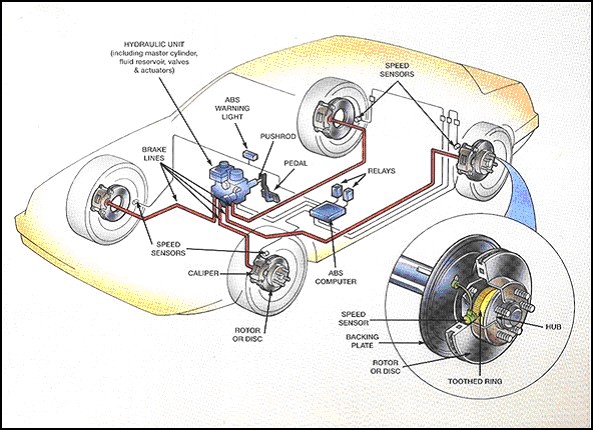
Allikas: Anti Lock Brake Operation
and Description http://www.2carpros.com/how_does_it_work/abs.htm
Esimesed töö ABS pidurisüsteemid olid ühekanalised. Sellises ABS
pidurisüsteemis vähendati pidurivedeliku survet
terves pidurisüsteemis tervikuna mille tagajärjel võis pidurdusteekond teatud
tingimustes oluliselt pikeneda. See on tingitud sellest, et kui erinevate
rataste haardejõud on erinev (nt vasakpoolsed rattad on asfaldil ning
parempoolsed jää peal) vähendati pidurdusjõudu ka parema haardevõimega ratastel.
Selle probleemi lahendamiseks olid hiljem loodud kahe- ja paljukanalised ABS
pidurisüsteemid. Viimastes reguleeritakse pidurivedeliku survet iga ratta kohta
eraldi.
Interneti leheküljel www.youtube.com on võimalik leida ABS`i süsteemi töö
põhimõtet tutvustavaid ning selle eeliseid kajastavaid filme. Käesoleva töö
autori poolt soovitatav asub aadressil: http://www.youtube.com/watch?v=uq4DDMMoomU
Levinuim veojõukontrolli inglise keelne lühend on ASR ehk Automatic Slip Regulation. Kuigi
erinevad tootjad nimetavad süsteemi erinevalt ning võib kohata ka lühendeid ASC,
A-TRAC, DSA, DTC, ETC, ETS, STC, TCS, TRC ja teisi, on kõikidel nendel süsteemidel
üks eesmärk ning sarnane tööpõhimõte.
Veojõukontrolli süsteemi eesmärk on vältida üleliigsest veojõust tingitud
veorataste läbilibisemist. Veojõukontrolli süsteemi töö põhineb ABS
pidurisüsteemi rataste pöörlemiskiiruste anduritel. Anduritelt saadud andmete
alusel tuvastab süsteem hetke millal üks või rohkem veoratastest hakkab läbi
libisema. Koostöös mootori juhtplokiga vähendab süsteem mootori võimsust, ning
vajadusel, kasutades ABS pidurisüsteemis olevat pidurivedeliku pumpa,
automaatselt pidurdab läbi libisema hakanud ratast.
Kuna rataste läbilibisemisel kaotab sõiduk juhitavuse sarnaselt rataste
blokeerumisele äkkpidurdamisel, siis võib väita, et veojõukontrolli süsteemi
eesmärk on sõiduki juhitavuse säilitamine vältides veorataste läbilibisemist.
Kuna tihti on rasketest (pehme lumi, liiv, savi) teeoludest väljumine
võimalik vaid tänu üleliigsele veojõule, on tavaliselt veojõukontrolli süsteem
sõidukitel väljalülitatav.
Sarnaselt ABS pidurisüsteemile hakati ka veojõukontrolli süsteemi
mootorratastele paigaldama oluliselt hiljem kui sõiduautodele. Näiteks Itaalia
mootorrataste tootja Ducati paigaldas esmakordselt veojõukontrolli süsteemi mudelile
Desmosedici RR alles 2007. aastal. Süsteem kannab nime DTC ehk Ducati Traction
Control.
Alates 2009. aastast pakub veojõukontrolli süsteemi maailma võimsaimale seeria
tootmises olevale mootorrattale ka BMW mudelile S1000RR. Sarnaselt Ducati`le on
süsteemi lühend DTC kuid tähendus teine – Dynamic Traction
Control.
Sarnaselt veojõukontrollile on ka stabiilsuskontrolli süsteemil palju
erinevaid ingliskeelseid lühendeid (ESC, DSC, DTSC, VSA, VSC, VDC, VDIM jne).
Nagu ka ABS`i ja turvapatja, hakkas esimesena maailmas stabiilsuskontrolli
süsteemi pakkuma samuti Mercedes-Benz.
Koostöös Bosch`iga töötas Mercedes-Benz stabiilsuskontrolli süsteemi välja
1994. aastal ning süsteem kandis nime ESP ehk Electronic Stability Program. Viis
aastat hiljem hakkas ESP olema kõikide Mercedes-Benz`ide lahutamatuks osaks
mille tõttu ESP on tänapäevani levinuim stabiilsuskontrolli süsteemi nimetus.
Stabiilsuskontrolli süsteem kasutab oma töös eelpool nimetatud ABS ja ASR
täiturseadeldisi ning nende ja teiste süsteemide andureid. ESP süsteemi
ülesanne on sõiduki külgmist kiirendust jälgides aidata juhti kriitilistes
situatsioonides ennetades sõiduki külglibisemisse sattumist. Ehk teisisõnu on ESP
ülesanne säilitada sõiduki trajektoor ja stabiliseerida sõiduk erinevate
manöövrite sooritamisel. Süsteemi toimimise põhimõte seisneb selles, et
külglibisemisse sattumist on võimalik ennetada ning külglibisemisest väljuda
mitte üksnes rooli keeramise ja/või gaasi lisamisega vaid ka pidurdamisega. Näiteks
kui auto esiots hakkab kurvist „välja vajuma“ peab autot mööda vertikaaltelge
juurde keerama. Seda on võimalik saavutada aeglustades tagumist ja/või esimest kurvisisest
ratast. Selle aeglustamisel tekib täiendav pöörlemise jõud. Sõiduki tagumise
osa kurvist „välja vajudes“ on vajalik aeglustada kurvivälist esimest ja/või
tagumist ratast. Selle käigus tekib vastupöörlemise jõud.
Joonis 2 illustreerib ESP süsteemi tööpõhimõtet. Joonisel on punasega märgitud
sõiduki trajektoor enne ESP süsteemi rakendumist ning rohelisega sõiduki
trajektoor peale ESP süsteemi rakendumist. Samuti on rohelisega märgitud rattad
milliseid ESP süsteem aeglustab.
Joonis
2
ESP süsteemi
tööpõhimõte
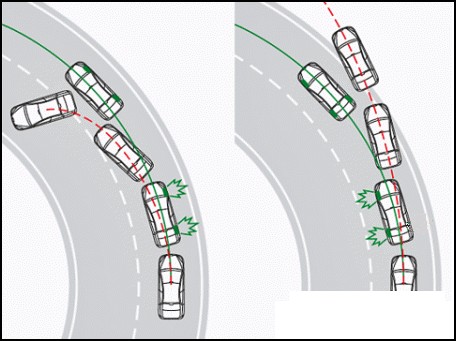
Allikas: Принцип
работы ESP. http://avtospletni.ru/technology/126-princip-raboty-esp.html
Kaasaaegne ESP süsteem on seotud ABS ja ASR süsteemidega ning mootori
juhtplokiga. ESP aktiivselt kasutab nende süsteemide komponente ning andureid,
kuid peamine informatsioon laekub süsteemile spetsiaalsetelt anduritelt mis
fikseerivad külglibisemise tekkimise hetke vertikaal teljel ning mõõdavad selle
suurust. Igal ajahetkel „teab“ ESP millise kiirusega sõiduk liigub, millisele
nurgale on keeratud rooliratas, millised on mootori pöörded, kas on
külglibisemist jne. Kõiki neid andmeid arvesse võttes annab süsteem käsu ühe
või mitme ratta pidurdamiseks. Millist ratast ning millise jõuga on antud
hetkel vajalik pidurdada otsustab süsteem automaatselt sõltuvalt olukorrast.
Süsteem töötab alati ja kõikides auto liikumise režiimides: kiirendamisel,
pidurdamisel, vabal käigul liikudes.
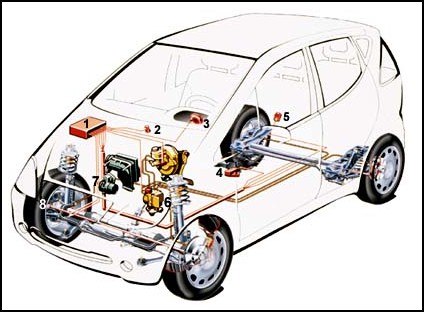
Joonisel 3 on kajastatud Mercedes-Benz A klassi ESP süsteemi osad ning nende
asukoht.
Joonis
3
ESP süsteemi
osad: 1- ESP süsteemi juhtplokk; 2- ASR süsteemi välja lülitamise
lüliti; 3- rooliratta keeramise nurga andur; 4- külgkiirenduste
andur; 5- sõiduki vertikaal telje suhtes pöörlemise andur; 6- pidurisüsteemi
täiturseadeldis; 7- drosselsiibri täitursealdis; 8- ratta
pöörlemise kiiruse andur
Allikas: "Дублер"
под капотом. 1999.
Авторевю, nr 5 (192), märts
Erinevalt ABS ja
ASR süsteemidest, kus elektroonika välistab rataste libisemist (kas
pidurdamisel või kiirendamisel) sõltumata rataste all olevast pinnasest, ei
välista ESP süsteem sõiduki külglibisemisse sattumist. ESP ei muuda füüsika
seadusi, vaid parandab juhi poolt tehtud vigu (valesti valitud sõidukiirus,
trajektoor jne), kuid seda ainult teatatud autole mõjuvate füüsiliste jõudude piirides.
Selle tõttu tasub pidevalt meeles pidada, et kuigi ESP vähendab külglibisemisse
sattumise tõenäosust, ei vabasta see autojuhti sõiduki juhtimisel arukast
mõtlemisest. Kuigi ESP süsteemi võimalused on piiratud, on siiski selle
tähtsust sõiduki turvaliseks muutmise osas väga raske üle hinnata. Just
tulenevalt ESP süsteemi suurest positiivsest mõjust liiklusohutusele, plaanib
Ameerika Ühendriikide liiklusohutuse amet (National Highway
Traffic Safety Administration) keelata alates 2011.a. ilma selle
süsteemita sõidukite müüki Ameerika Ühendriikides.
Tulenevalt asjaolust, et ESP ei välista sõiduki külglibisemisse
sattumist, arendab auto elektroonika tootja Bosch ESP süsteemi selles suunas,
et külglibisemisse sattumisel muudaks ESP sõiduki külglibisemise trajektoori
selliselt, et vältimatu külgmine kokkupõrge postiga või puuga oleks võimalikult
sirgema nurgaga. Bosch`i inseneride sõnade kohaselt on tänapäeva sõidukitel
sellise süsteemi loomiseks peaaegu kõik juba olemas. Vajalik on vaid ESP
süsteemi tarkvara ümberkirjutamine ning sõiduki ustesse täiendavate sõiduki kiirendust
mõõtvate andurite paigaldamine. Kui arvuti arvutab välja, et kokkupõrge on
vältimatu, keerab ta sõiduki selliselt (sõiduki pidurisüsteemi kasutades) ringi,
et kokkupõrge tagajärjed oleksid võimalikult kergemad ning seda sõltumata
sõidukijuhi tegevustest. Hetk enne kokkupõrget avab süsteem ka külgmised
turvapadjad. Sellise süsteemi autoajakirjanikele 2007. aastal demonstreerimisel,
planeeris Bosch süsteemi autodele paigaldamist 2008. aasta lõppu.
Käesoleva töö kirjutamise hetkel ei ole töö autor teadlik sellest, et nimetatud
süsteem oleks rakendamist leidnud. Kui nimetatud ESP süsteemi täiendus aset
leiab, siis ei ole enam võimalik ESP süsteemi aktiivseks turvaseadmeks nimetada,
kuna see hakkab sisaldama ka passiivsete turvaseadmete tunnuseid (vt käesoleva
töö punkti 1.2). Joonisel 4 on illustreeritud käesolevas lõikes kirjeldatud
süsteemi tööpõhimõtet.
Kuna ESP süsteemi töö on otseselt seotud sõiduki raskuskeskmega, mis jääb
sõiduki paremate ja vasakute rataste vahele, ei ole süsteemi kasutamine mõeldav
mootorratastel kus sõiduki raskuskese on ühel teljel ratastega.
Interneti leheküljel www.youtube.com on võimalik leida ESP süsteemi töö
põhimõtet tutvustavaid ning selle eeliseid kajastavaid filme. Käesoleva töö
autori poolt soovitatav asub aadressil: http://www.youtube.com/watch?v=WmCJtsRYE3c&feature=related
Kaasaegsetel autodel on käesoleva töö punktis 1.1.1 kirjeldatud ABS
pidurisüsteemi täiendatud pidurdusjõu jaotussüsteemiga. Selle süsteemi
inglisekeelne lühend on EBD ehk Electronic Brake Force Distribution. EBD
süsteemi puhul on tegemist ABS süsteemi tarkvaralise täiendusega.
Kui ABS süsteem takistab rataste blokeerumist, siis EBD süsteem kontrollib seda
protsessi. Süsteem saab näiteks jaotada pidurivedeliku survet esimeste ja
tagumiste ning paremate ja vasakute rataste vahel..
Erinevalt ABS`is on EBD eesmärk vähendada pidurdusteekonda.
Joonis
4
ESP
uue põlvkonna täiendavad võimalused

Allikas: Юрий
Ветров.
Самоуправство.
2007. Авторевю, nr 16 (386), august
Mootorratastel enamasti puudub vajadus EBD süsteemi järele kuna
tavaliselt on mootorratastel eraldi link esi ja tagapidurite jaoks ning juht
reguleerib esi- ja tagarataste pidurdusjõu suurust ise. Kuid on olemas ka nn
integraalsed pidurisüsteemid, kus juhtraual asuva lingi või parema jalalaba all
asuva kangi vajutamisel rakenduvad nii esimesed kui ka tagumised pidurid. BMW
varustab sellised pidurisüsteemid ABS`iga mis on täiendatud pidurdusjõu
jaotussüsteemiga.
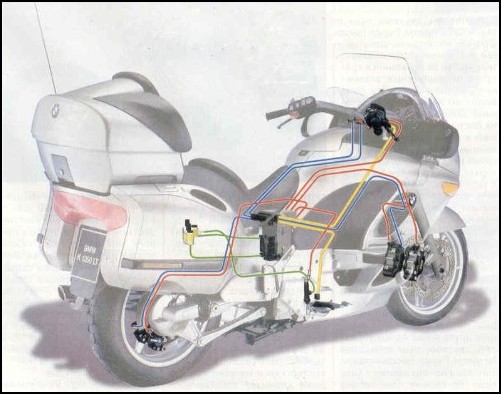
Joonisel 5 on kajastatud sellise süsteemi skeem mootorrattal BMW K1200LT. Kollasega
on joonisel kajastatud hüdrovõimendi sisselülitamise juhtmestik, punasega on
ära toodud hüdraulika magistraalid ning sinisega ABS süsteemi juhtmestik.
Joonis
5
Mootorratta
BMW K1200LT ABS`i ja pidurdusjõu jaotussüsteemi osade asukoha skeem
Allikas: Александр
Воронцов.
АБС: тормози -
не упадешь! 2000.
Мото, nr 12,
detsember
Äkkpidurduse süsteemi inglise keelne lühend on BAS ehk Brake Assist
System mis eesti keeles tähendab „pidurisüsteemi abisüsteem“. BAS aitab juhil
kriitilises situatsioonis realiseerida piduripedaalil maksimaalse surve
äkkpidurdamise esimestel hetkedel. Ehk teisisõnu kiirendab BAS sõiduki
pidurisüsteemi rakendumist. Tehniliselt on see realiseeritud nii, et
pidurivõimendis on sisse ehitatud varre liikumiskiiruse andur. Kohe kui süsteem
mõõdab ära, et vars liigub väga kiiresti (juht äkiliselt vajutab piduripedaali),
rakendub elektriline magnet mis suurendab varre liikumiskiirust. Tänu sellele
juba sekundi murdosa peale piduri pedaalile vajutamist aitab süsteem saavutada
efektiivseima pidurdamise.
Lisaks sellele BAS „peab meeles“ kuidas antud juht pidurit tavaolukorras
kasutab, mille tõttu on süsteemil lihtsam tuvastada äkkpidurdamist. Kuid samas
isegi libedal teel ei toimu rataste blokeerumist kuna õigel ajal rakendub ABS.
Ehk BAS aitab juhti vaid pidurdamise esimesel hetkel.
Erinevalt eelnevalt kirjeldatud süsteemidest on BAS`i eesmärk
pidurdusteekonna vähendamine läbi kiirema pidurisüsteemi rakendamise. Äkkpidurdamisel
kiiruselt 100km/t on BAS`iga varustatud sõiduki pidurdusteekond 6 meetri võrra lühem (40m) võrreldes sama kuid BAS`ita sõiduki tulemusega.
Kuna tavaliselt mootorrataste pidurisüsteemides ei kasutata
pidurivõimendid siis tööautorile teadaolevalt ei ole BAS`i kasutamine
mootorratastel aset leidnud.
Interneti leheküljel www.youtube.com on võimalik leida BAS`i süsteemi töö
põhimõtet tutvustavaid ning selle eeliseid kajastavaid filme. Käesoleva töö
autori poolt soovitatav asub aadressil: http://www.youtube.com/watch?v=pJPPc0kcj3U
Sõiduraja jälgimise süsteem on veel üks aktiivne sõiduki turvaseade. Nagu
süsteemi nimetusest näha, on süsteemi eesmärk jälgida teekatte märgistust ning
teavitada autojuhti kui ta ületab oma sõiduraja piire. Erinevad autotootjad
nimetavad oma süsteemi erinevalt. Käesolevas peatükis on kirjeldatud Honda
poolt väljatöötatud süsteemi LKAS ehk Lane-Keeping Assist System
töö põhimõtet. Lane-Keeping Assist System tähendab eesti
keeles „rajal liikumise abi süsteem“.
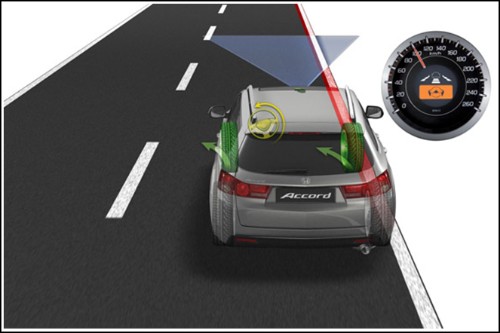
Sõiduki salongi tahavaate peegli kohal on klaasile paigaldatud väike
videokaamera (joonis 6) suunaga autost väljapoole. Videokaamera signaal on
ühendatud sõidukis paigaldatud arvutiga, mis on omakorda varustatud kujude
eristamise tarkvaraga. Peamine kuju millist arvuti „jahib“ on teekatte märgistus.
Süsteem oskab eristada pidevat joont katkend joonest, „ennustada“ ja jälgida
nende kõverust, hinnata kurvi kõverust. Arvutist edastatakse saadud signaal
elektrilisele rooli võimendile. Kui videokaamera tuvastab, et sõiduk kaldub
eemale sõiduraja tsentrist, keerab elektriline roolivõimendi rooli vastassuunas
tuues sõiduk tagasi sõiduraja keskele. Kuid turvalisuse mõttes on automaatne
rooli keeramine piiratud ning vajadusel on võimalik rooli süsteemile vastu
keerata ületades selleks väikest kuid märgatavat roolivõimendi vastupanu.
Automaatselt ehk ilma juhi abita peab süsteem sõidukit sõiduraja keskel vaid
kurvides mille raadius on vähemalt 230 meetrit. Kurvides mille läbimõõt on väiksem, süsteem vaid aitab juhil sõidukit sõiduraja keskel hoida. Kui süsteem
tuvastab, et sõiduk kaldub sõiduraja keskelt eemale, tekitab ta selles suunas
rooliratta keeramisel roolirattal vastusurve ning vastupidises suunas
rooliratta keeramisel aitab kaasa selliselt, et rooli keeramine on väga kerge.
Tänu sellele on võimalik sõidukit sõiduraja keskel hoida sisuliselt kinniste
silmadega.
Joonis
6
Honda
LKAS süsteemi videokaamera

Allikas: Honda
LKAS. Le Moniteur
Automobile. http://www.letelegramme-auto.com/honda-lkas-article-661.htm
Nagu ka kõik eelnevalt kirjeldatud süsteemid, on tegemist abistava, mitte
juhi eest tegutseva süsteemiga. Juht peab siiski teed ise jälgima ning rooli kätega
hoidma. Rooliratta pealt käte maha võtmisel teavitab süsteem mõne sekundilise
viivitusega kätte roolirattale panemise vajadusest, aktiveerides armatuuril
kollase tule millel on kajastatud rooliratas ja käed. Joonisel 6 on kujutatud
LKAS`i süsteemi tööpõhimõte ning käte roolile panemise vajalikkuse hoiatustuli.
Kui teekatte märgistus ei ole loetav või on puudulik, lülitub LKAS
süsteem automaatselt välja. Lisaks sellele on süsteemi võimalik välja lülitada
roolil oleva nupu abil. Samuti lülitub süsteem välja suunatule näitamisel.
Sellisel juhul sõiduraja vahetamisel ei tekita süsteem roolirattal vastujõudu.
Interneti leheküljel www.youtube.com on võimalik leida LKAS`i süsteemi
töö põhimõtet tutvustavaid ning selle eeliseid kajastavaid video filme.
Käesoleva töö autori poolt soovitatav asub aadressil: http://www.youtube.com/watch?v=Z2HZSn0cYEE&feature=related
Öösel valgustamata või halvasti valgustatud tänavatel on tee peal olevate
takistuste märkamine keeruline ning tihti märgatakse neid liiga hilja. Selle
probleemi lahendamiseks on erinevad sõidukite tootjad välja töötanud
erinevaid seadmeid mis aitavad juhti pimedal ajal sõitmisel. Süsteemide
Joonis
6
LKAS
süsteemi tööpõhimõte
Allikas:
Honda LKAS. Le
Moniteur Automobile.
http://www.letelegramme-auto.com/honda-lkas-article-661.htm
tööpõhimõte on sarnane. Spetsiaalne videokaamera mis „näeb“ ka pimedas, edastab
pilti autos paigaldatud ekraanile. Kuid kõikide nende süsteemide puuduseks on
see, et need suudavad eristada vaid sooja kiirgavaid tee peal ja selle ääres
olevaid esemeid (nt metsloomad, inimesed) ning nendest juhti teavitada.
Selle probleemi lahendamiseks töötas Mercedes-Benz välja uuel tööpõhimõttel
töötava öösõidu abisüsteemi mille nimi on Nachtsicht Assistent
ehk öövaate abi.
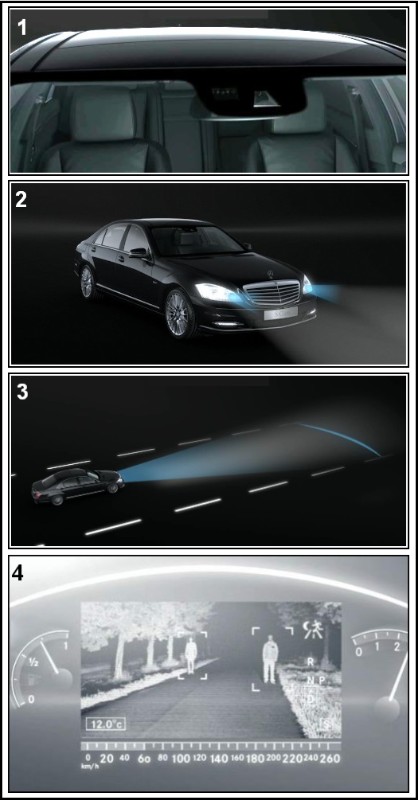
Sõiduki salongisisese peegli piirkonnas suunaga autost väljapoole on
esiklaasile paigaldatud videokaamera mis „näeb“ infrapuna valgust. Sõiduki
esiosas on lisaks tavatuledele paigaldatud infrapuna tuled. Infrapuna valguse
kaugus on võrdne sõiduki bi-xenon tulede kaugusele, kuid selle eelis on see, et
see ei pimesta vastutuleva sõiduki juhti kuna infrapuna valgus ei ole inimese
silmaga nähtav. Hetkel paigaldab Mercedes-Benz nimetatud süsteemi S ja CL
klassi sõidukitele. Süsteemi sisselülitamisel kuvab arvuti sõiduki armatuuril
spidomeetri asemel kaamera pildi. Kiirust hakatakse kajastama horisontaalse
joonena kaamera pildi all. Suur 8 tolline ekraan asub juhi heas vaateväljas mis võimaldab autojuhil jälgida ekraanil toimuvat tee pealt pilgu ära viimata.
Süsteemi eelis teise süsteemide ees on see, et tänu infrapuna valgusele
eristab süsteemi lisaks soojadele ka külmasid tee peal olevaid takistusi (nt
pargitud auto, kivi, puu jne). Ekraanil olev pilt on sarnane sellele mida näeb
juht sõiduki esiklaasist sisselülitatud kaugtuledega, kuid erinevalt
esiklaasist välja vaadates näeb juht ekraanil samasugust pilti ka siis, kui
vastu tuleb sõiduk ning juhi enda autol on sisse lülitatud lähituled. Tänu
sellele süsteemile näeb juht pidevalt umbes kaks korda kaugemale kui ainult
lähitulesid kasutades. Tänu sellele muutub öine sõit oluliselt turvalisemaks.
Joonisel 7 on kujutatud süsteemi peamised elemendid ning selle tööpõhimõte.
Öösõidu abisüsteemi eeliseid tutvustava filmiga on võimalik tutvuda sellise
süsteemi tootja Autoliv Inc interneti leheküljel: http://www.autoliv.com/avi/NightVisionCityScene.wmv
Töö punktides 1.1.1…1.1.7 nimetatud aktiivse turvalisuse seadmed on
otseselt suunatud liiklusõnnetuse tekkimise tõenäosuse vähendamisele, kuid ükski
neist otseselt ei aita liiklusõnnetust vältida. Sellest tulenevalt on mõned
autotootjad juba välja töötanud ning mõnedel on väljatöötamisel turvasüsteemid
mis liiklusohtliku olukorra algfaasis teavitavad sõidukijuhti ohtliku olukorra
tekkimisest (aktiivne turvaseade), ning lõppfaasis tegutsevad
iseseisvalt, autojuhi tegevustest sõltumata, liiklusõnnetuse tagajärgede
leevendamiseks (passiivne turvaseade (vt töö punkti 1.2)). Kuigi sellised
süsteemid sisaldavad nii aktiivse kui ka passiivse turvasüsteemi tunnuseid,
kuuluvad nad pigem aktiivsete turvasüsteemide hulka kuna need on aktiivsed kogu
sõiduki liikumise ajal.
Töö kirjutamise hetkel on sellised süsteemid nt (kuid mitte ainult)
kasutusel Mercedes-Benz`il (Pre-Safe)
ning Honda`l (CMS - Collision Mitigation System ehk
kokkupõrget leevendav süsteem).
Liiklusõnnetuse ennetamise, kuid teisel põhimõttel töötavat süsteemi on välja
töötamas ka Volvo, nimetades oma süsteemi Collision Avoidance by Auto Steering
(edaspidi nimetatud CAAS) ehk kokkupõrke ära hoidmine automaatse rooli
keeramise kaudu.
Pre-Safe`i ja CMS`i tööpõhimõte on sarnane. Süsteemid jälgivad sõiduki
ees toimuvat. Tee peal oleva takistusega (nt seisev sõiduk) ohtlikul
lähenemisel juhivad (helisignaaliga, hoiatustule aktiveerimisega ning
turvavööde edasi tagasi tõmbamisega)
süsteemid autojuhti tähelepanu ohtlikule lähenemisele. Kui autojuht ei võta
teatud hetkeni midagi ette (nt pidurdamine, või sõiduraja vahetamine), et
ohtliku lähenemist katkestada, valmistavad süsteemid sõiduki kokkupõrkeks
(pingutatakse turvavöösid (vt töö
Joonis
7
Mercedes-Benz`i Nachtsicht Assistent süsteemi peamised elemendid ning töö
põhimõte: 1- infrapuna videokaamera; 2- infrapuna tuled; 3-
infrapuna valgustite valgustatud ala on umbes võrdne bi-xenon kaugtulede
valguskaugusele; 4- 8 tollisel ekraanil on hästi nähtavad nii külmad kui
ka soojad objektid.
Allikas:
Nachtsicht Assistent. www.mercedes-benz.com
punkti 1.2.2.b), suletakse aknad jne).
Kui autojuht ei võta endiselt midagi ette, siis hetkel mil süsteemi arvates on
kokkupõrge vältimatu, rakendab süsteem automaatselt sõiduki pidurisüsteemi
umbes 60%lise
võimsusega maksimaalsest. CAAS`i süsteem erinevus seisneb selles, et see ei
pidurda viimasel hetkel vaid keerab automaatselt rooli vahetades sõidurada.
Käesoleva töö raames ei ole võimalik põhjalikult kirjeldada kõikide nende
süsteemide tööpõhimõtteid ning kuna nende kasutamine ei ole käesoleval hetkel
massiline, ei pea töö autor nende lahtikirjutamist vajalikuks.
Interneti leheküljel www.youtube.com on võimalik leida Pre-Safe`i ja CMS `i
süsteemide töö põhimõtet tutvustavaid ning nende eeliseid kajastatavaid filme.
Käesoleva töö autori poolt soovitatav asub aadressil: http://www.youtube.com/watch?v=fMqEf4NwsKg
1.1.9
Muud aktiivsed turvaseadmed
Eelpool on
toodud autori arvates efektiivseimad aktiivsed turvaseadmed, kuid lisaks
nendele on olemas hulk teisi aktiivseid turvaseadmeid mis on vähem efektiivsed
kuid siiski tähtsad liiklusohutuse seisukohalt. Allpool on toodud mõnede
selliste süsteemide lühikirjeldus.
a)
HID (high-intensity discharge lamp) ehk nn
ksenoon tuled. Sõiduki esituledes kasutatavad pirnid milliste valgus saadakse erinevalt
tavalisest tulest gaaside helendamise käigus. Ksenoon tulesid iseloomustab
oluliselt tugevam valgus (umbes 5000K tavalise tule umbes 2800K vastu)
oluliselt väiksema elektri tarbimisega. Ksenoon tuledega varustatud sõidukil
peab kindlasti olema automaatne tulede kõrguse regulaator ning esitulede
pesurid. Nendeta on ksenoon pirnide kasutamine keelatud.
b)
Pööratavad laternad - kurvis kurvi suunas pööratavad peamised või
täiendavad esituled. Eesmärk on kurvi sisese tee ääre parem valgustamine
võimaldamaks oluliselt varem näha kurvi siseses tee ääres olevat takistust.
c)
Ohutulede sisselülitamine äkkpidurdamisel. Automaatne süsteem mis
aktiveerib sõiduki ohutuled äkilisel pidurdamisel. Tavaliselt aktiveerub üle 70
km/t kiirusega sõites äkkpidurdust tehes. Süsteemi eesmärk on tõmmata teiste
liiklejate tähelepanu ohtlikule liiklussituatsioonile selle vältimiseks.
d)
Vilkuv pidurituli. Automaatne süsteem mis äkkpidurdamisel paneb
pidurituled vilkuma. Vilkuv pidurituli on oluliselt paremini märgatav kui
konstantselt põlev. Eesmärk on sõiduki taga sõitva juhi tähelepanu ohtlikule
situatsioonile pööramine. Tavaliselt aktiveerub ABS`i rakendumisel sõltumata
sõidukiirusest.
e)
Kliimaseadet või konditsioneeri peetakse tihti kui mugavuse varustust,
kuid sellel on otsene seos aktiivse turvavarustusega. Auto salongis
temperatuuri tõusmisel 200lt 300le suureneb juhi
reaktsiooniaeg 32% võrra.
Lisaks sellele kuivatab konditsioneer salongi sisest õhku mis võimaldab
kiiremini „higistama“ hakanu klaase kuivaks ehk läbipaistvamaks saada.
f)
Sisseehitatud alkomeeter. Väga haruldane lisavarustus tänu millele
kontrollib elektroonika enne sõiduki käivitumist autojuhi alkoholi sisaldust
veres. Kui alkoholi sisaldus veres ületab teatud piiri siis ei ole võimalik
sõiduki mootorit käivitada.
g)
Kiirust reguleerivate märkide jälgimise kaamerad. Autole paigaldatud
videokaamera ning tarkvara tuvastavad tee ääres olevaid kiirust reguleerivaid
märke, ning dubleerivad nende sisu sõiduki esipaneelil. Eesmärk on tagada juhi
teadlikust kiiruse piirangust ka siis, kui ta ei ole märki märganud.
h)
Navigatsiooni ja infosüsteemi ekraani „tükeldatud vaade“ (inglise keelne
nimetus SplitView).
Süsteemi eesmärk on autojuhi tähelepanu säilitamine kaasreisijate poolt sõidu
ajal DVD või muu filmi vaatamisel. Esipaneeli sisseehitatud ekraan on võimeline
näitama üheaegselt kahte erinevat pilti. Kuid iga pilt on nähtav vaid teatud
nurga all tänu millele näeb juht ekraanilt nt navigatsiooni süsteemi pilti samal
ajal, kui kõrvalistuja vaatab samalt ekraanilt nt ilmateadet.
Joonis 8
SplitView süteemi töö: 1-ekraani pilt juhi
vaatekohalt; 2-ekraani pilt samal ajal kõrvaistuja kohalt
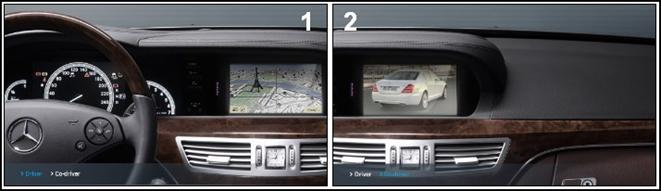
Allikas:
SplitView. www.mercedes-benz.com
i)
Kaug- ja lähitulede automaatne ümberlülitus. Öisel ajal sõites tuvastab
süsteem vastutulevat sõidukit ning automaatselt lülitab kaugtuled ümber
lähituledeks. Vastassuuna sõiduki möödumisel lülitab süsteem automaatselt sisse
kaugtuled. Süsteemi eesmärk on vältida vastutuleva sõiduki pimestamist.
j)
Elektrooniline diferentsiaali lukk on mõeldud efektiivseima kiirenduse
tagamiseks libedal teel. Sõidu alustamisel ning kiirendamisel pidurdab süsteem
libisema hakanud ratta raskendades selle pöörlemist. Selle tagajärjel veosillas
asuv diferentsiaal suunab veojõu teisele (suurema haardejõuga) rattale.
k)
Püsikiiruse hoidja ja adaptiivne püsikiiruse hoidja. Süsteem mis hoiab
juhi poolt kindlaks määratud kiirust ilma juhi poolt gaasi või pidurit
vajutamata (nt mäkke tõusul või langusel). Adaptiivne püsikiiruse hoidja lisaks
sellele hoiab kindlaks määratud vahemaad eessõitva autoni vähendades kiirust
kui eessõitev auto seda vähendab.
l)
Adaptiivsed tuled (erinevate tootjate süsteemid kannavad erinevaid
nimesid: Dynamic Xenon, AFL+, Intelligent Light jne). Süsteemi eesmärk on öise
sõidu ajal maksimaalse valgustuse tagamine vältides seejuures vastutuleva
sõiduki juhi pimestamise. Vastutuleva sõiduki tuvastamisel ei lülita süsteem
automaatselt sisse lähitule, vaid auto lähenedes reguleerib parema ja vasaku
tule kõrgust erinevalt, tagades võimalikult kaugele ulatuva tee valgustamise
(vt joonis 9).
Joonis 9
Mercedes-Benz Intelligent Light süsteemi töö põhimõte
Allikas: Юрий
Ветров.
Звезда
безопасности.
2009. Авторевю, nr 06 (423), märts
m) Allamäge
liikumise abisüsteem (Downhill Assist). Tavaliselt
paigaldatakse see süsteem maastikusõidukitele. Süsteemi eesmärk on maastikul
mäest alla sõites hoida automaatselt kiirust mitte üle teatud piiri (tavaliselt
kuni 15km/h).
n)
Automaatne käsipidur. Sõiduki käsipiduri süsteem milles puudub
mehaaniline ühendust käsipiduri kangi ja pidurimehhanismi vahel. Tavaliselt
läheb käsipidur automaatselt peale alati mootori välja lülitamisel, mis välistab
sõiduki sanktsioneerimata veeremise (nt mäest alla) peale sõiduki parkimist.
Sõidu alustamisel läheb käsipidur automaatselt maha mis välistab sõiduki alla
veeremise mäkke sõidu alustamisel.
o)
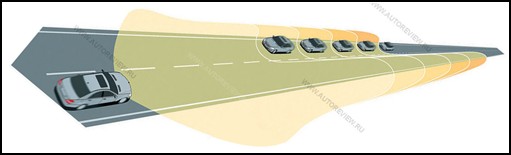
Pimeda tsooni jälgimise süsteem. Igal sõidukil sõltumata margist ja
tüübist (mootorratas, sõiduauto, veoauto, buss) on olemas nn pime tsoon.
Pimedaks tsooniks nimetatakse sõiduki lähiümbruses olevat ala mida ei ole
võimalik näha vaid sõiduki peeglitesse vaadates. Sõiduraja vahetamisel teavitab
pimeda tsooni jälgimise süsteem sõiduki juhti pimedas tsoonis olevast
objektist. Teavitamise süsteem võib tootjate lõikes olla erinev kuid tavaliselt
toimub teavitamine tahavaate peegli nurgas süttiva punase kolmnurga abil (vt
joonis 10).
Joonis 10
Pimeda tsooni jälgimise süsteemi hoiatustuli

Allikas: Blind-Spot. www.mercedes-benz.com
p)
Ülesmäge sõidu alustamise abisüsteem (Hill Start Assist).
Süsteemi eesmärk on sõiduki tagasiveeremise vältimine mäkke sõidu alustamisel.
Erinevus automaatsest käsipidurist seisneb selles, et alla veeremist
saavutatakse mitte käsipiduri süsteemi kaudu vaid tööpiduri süsteemi kaudu.
Peale piduri pedaalilt jala maha võtmist hoiab ABS pidurisüsteem pidurid veel
mõni sekund peale vajutatuna. Aeg on piisav jala piduri pedaalilt gaasi
pedaalile üleviimiseks.
q)
Parkimisabi. Sõiduki esi- ja/või tagastangesse on paigaldatud andurid
mis mõõdavad vahemaad stange ees oleva takistuseni. Süsteemi eesmärk on
teavitada autojuhti ohtlikust lähenemisest takistusele sõiduki parkimisel
Passiivseteks turvaseadmeteks
on seadmed mis rakenduvad siis, kui liiklusõnnetus on vältimatu ning nende eesmärk
on kergendada liiklusõnnetuste tagajärgi. Passiivsed turvasüsteemid kaitsevad
konkreetses sõidukis istujaid kui ka teisi liiklejaid (nt jalakäiad).
Passiivsete turvaseadmete efektiivsust saab hinnata selle järgi kui hästi
suudab sõiduk säilitada selles olijate ja jalakäijate elu ja tervist.
Hindamaks sõidukite passiivse turvalisuse taset, viiakse autotootjate
ning erinevate sõltumatute (nt TRL (UK Transport Research Laboratory)
Inglismaal, TNO (Nederlandse organisatie voor Toegepast-Natuurwetenschappelijk Onderzoek)
Hollandis, UTAC (L'Union Technique de l’Automobile)
Prantsusmaal, BASt (Bundesanstalt fur Strassenwesen)
Saksamaal)
organisatsioonide poolt sõidukitega läbi avarii teste (nn crush test)
mille käigus tehakse sõidukitega spetsiaalsetes laborites avariisid ning
uuritakse nende tulemusi eesmärgiga muuta sõidukeid turvalisemaks. Ühendamaks
nimetatud organisatsioonide spetsialistide teadmisi eesmärgiga saavutada
paremaid tulemusi selles valdkonnas, oli 1997.a. Inglismaa
transpordiministeeriumi tellimusel TRL poolt asutatud organisatsioon nimega EuroNCAP
ehk European New Car Assessment Programme (Euroopa programm uute autode
hindamiseks). EuroNCAP`i
eesmärk oli läbi viia sõidukite avarii teste, ning avalikustades nende tulemusi
motiveerida autotootjaid tõstma sõidukite turvalisust. Hiljem ühinesid
organisatsiooniga veel 6 valitsust
(Prantsusmaa, Saksamaa, Rootsi, Hollandi, Hispaania ja Luksemburgi omad),
autospordi klubid FIA (The Fédération Internationale de l'Automobile ehk
rahvusvaheline mootorspordi föderatsioon)
liikmelisuse kaudu ning Saksamaa autoklubi ADAC.
EuroNCAP`i laiahaardeline rahvusvaheline liikmelisus tagab selle sõltumatuse
ning testide tulemuste usaldusväärsuse. Koos EuroNCAP`i asutamisega olid väljatöötatud
reeglid (vt joonis 11) vastavalt millistele sõidukitega avarii teste läbi
viiakse.
Peale esimeste EuroNCAP´i testide läbiviimist kurtsid autotootjad, et
sõidukite hindamise kriteeriumid on nii ranged, et ükski sõiduk ei suuda kunagi
saavutada 4 tärni tulemust, kuid juba samal aastas saavutas Volvo S40 4 tärni
tulemuse. Vaid 4 aastat hiljem ehk 2001.a. saavutas Renault Laguna esimesena
maailmas 5 tärni tulemuse.
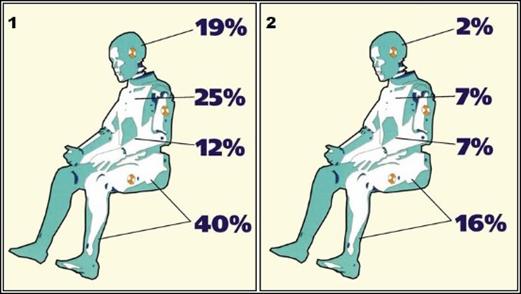
12 aastaga on sõidukite passiivse turvalisuse tase tänu EuroNCAP`i testidele
tõusnud niivõrd palju, et tänapäeval saavutab pea iga sõiduk 5 tärni tulemuse,
mille tõttu teatas EuroNCAP 2009.a. veebruaris, et tõstab sõidukite hindamise
kriteeriume veelgi. Veel paremini kajastab EuroNCAP`i panust sõidukite
passiivse turvalisuse tõstmisesse joonisel 12 kajastatud erinevate kehaosade
vigastuste saamise tõenäosus erinevatel aastatel toodetud Renault`ite
sõidukitel.
Joonis
11
EuroNCAP
avariitestide läbiviimise tingimused: 1-frontaalne
kokkupõrge;
2-külgkokkupõrge; 3-külgkokkupõrge postiga.
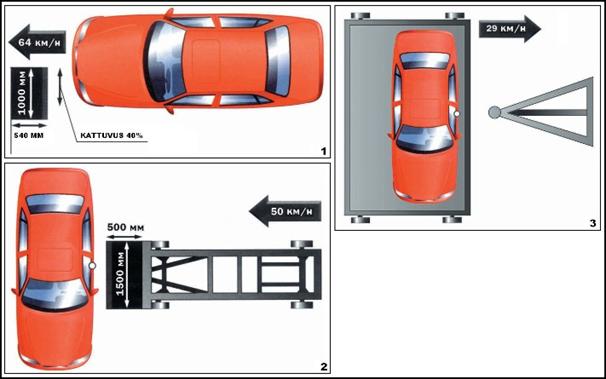
Allikas: Леонид
Голованов. 2002.
Анатомический
театр. Авторевю, nr 13-14 (269), juuli
Joonis
12
Kehaosade
vigastuste saamise tõenäosus laupkokkupõrke puhul vastavalt EuroNCAP avarii
testide reeglitele: 1-1980...1990 toodetud Renault`i mudelid; 2-1998...20002
toodetud Renault`i mudelid.
Allikas: Михаил
Подорожанский.
Аксидентология. 2002.
Авторевю, nr 12 (268), juuni
Tänu
EuroNCAP`ile on autode passiivse turvalisuse uurimine muutunud nii mastaapseks,
et tänaseks päevaks on sellest saanud eraldiseisev teadusvaldkond, mis kannab
nime aksidentoloogia (prantsuse keelsest sõnast Accidentologie). Aksidentoloogia
on teadusvaldkond mis uurib liiklusõnnetusi, nende põhjusi, nende tagajärgi
ning nende ennetamise võimalusi.
Esimene turvavöö
oli sõidukisse paigaldatud Volvo poolt 1949.a.
Peale kokkupõrke energiat neelava kere (vt töö punkt 1.2.5) on turvavöö peamine
sõiduki passiivse turvalisuse element. Kõik muud sõiduki passiivse turvalisuse
elemendid on väljatöötatud turvavöö täiendamiseks ning sellega koostöös
töötamiseks. Turvavöö mitte kasutamine toob kaasa tõsiseid kehavigastusi isegi
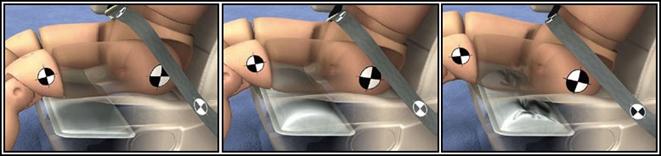
väiksematel kiirustel liiklusõnnetusse sattumisel. Näitamaks turvavöö kasutamise
vajadust isegi väikestel kiirustel, on joonisel 13 toodud sõiduki esiklaasi
vigastus, mille põhjustas turvavööga kinnitamata katsemanekeni vastu esiklaasi
lendamine avarii testi käigus kiirusel 15 km/t. Üks põhjus miks turvavöö on
peamine turvalisuse element on see, et erinevalt enamusest teistest
passiivsetest turvaelementidest, mis kaitsevad sõidukis viibijat vaid liiklusõnnetuse
esimestel hetkel (nt turvapadi tühjeneb koheselt peale avanemist), kaitseb
turvavöö sõitjat kuni liiklusõnnetuse lõpuni (nt sõiduki mitmekordsel ümber
katuse rullumisel mis võib kesta mitu sekundit).
Joonis
13
Turvavööga
kinnitamata katsemannekeeni „peaga“
põhjustatud
esiklaasi vigastus avarii testi käigus kiirusel 15km/t.

Allikas: Илья
Хлебушкин.
Приключения
«итальянца»
из России. 2009.
Авторевю, nr 21 (437), november
Rõhutamaks
turvavööde tähtsust passiivse turvalisuse tagamisel, hakkas teatud ajast
EuroNCAP testide avalikustamisel sõiduki turvalisuse taset näitavatel
illustratsioonidel mannekeene kajastama turvavööga kinnitatuna, kuigi varem
kajastati neid turvavööga kinnitamatuna (vt joonis 14).
Joonis 14
Varasematel EuroNCAP avarii testide tulemustel on mannekeenid
kajastatud turvavööga kinnitamatuna: 1-MB SLK testi tulemused 2002.a; 2-
MB C klassi testi tulemused 2007.a.

Allikas 1: Леонид
Голованов. 2002.
Анатомический
театр. Авторевю,
nr 13-14 (269), juuli;
Allikas 2: Игорь
Владимирский.
Рейтинг
безопасности EuroNCAP. 2008.
Авторевю, nr 1 (395), jaanuar
Samuti
rõhutamaks turvavöö kasutamise tähtsust, antakse alates november 2001.a.
EuroNCAP avarii testidel sõidukitele 1 lisapunkt kui sõiduk on varustatud juhi
kinnitamata turvavöö meeldetuletuse süsteemiga, ning 2 lisapunkti kui sõiduk on
varustatud juhi ja kõrvalistuja kinnitamata turvavöö meeldetuletuse süsteemiga.
Samuti illustreerivad turvavöö kasutamise vajadust hästi töö lisas 2 toodud
graafikud.
Arvestades
turvavööde tähtsust turvalisuse tagamisel on autotootjad neid läbi aegade
täiendanud tagamaks veel suurema turvalisuse. Turvavööde arendamise käigus on neid
täiendatud järgmiste süsteemidega:
Turvavööde
algaastatel olid kasutusel turvavööd milliste pikkust tuli reguleerida käsitsi
iga kord kui seda kasutas inimene, kes oli suurem või väiksem turvavööd
eelnevalt kasutanud inimesest. Turvavöö pikkuse reguleerimise vajadus tuleneb
sellest, et turvavöö tagab kaitset vaid juhul, kui see on tihedalt inimese
rinna peal ning inimese ja istme vahel puudub vaba ruum. Tegemist oli ebamugava
süsteemiga, kuna isegi istme kauguse reguleerimisel tuli uuesti reguleerida
rihma pikkust. Samuti ei võimaldanud selline turvavöö inimesel nihutada ennast
ettepoole nt kindalaekast asja võtmiseks. Selle probleemi lahendamiseks olid
välja töötatud ELR (Emergency Locking Retractor
ehk hädaolukorra lukustamise retraktor) kolmepunkti turvavööd millised on
kasutusel kõikidel kaasaaegsetel sõidukitel (v.a. mõned sportliku kallakuga
autod). Tegemist on turvavööga millel on kinnises asendis kolm kinnituspunkti
ning millel puudub vajadus reguleerida pikkust kuna kogu turvavöö on lahtises
asendis keeratud rulli. Turvavöö kinnitamisel tuleb see rullist välja ning
peale kinnitamist tõmbab vedru üleliigse turvavöö osa tagasi rulli. Liiklusõnnetuse
korral süsteem lukustub ning ei võimalda turvavööl rullist välja tulla. Tegemist
on mugava ja turvalise süsteemiga, kuid süsteem ei taga piisavat kaitset
lastetoolide kinnitamisel. Lastele ei ole piisav kaitse sellise turvavööga tagatud
kuna lapsetoolis istuv laps nihutab enda toolis liigutamisega tooli paigast ära,
ning lapse tooli ja auto istme vahele tekib vaba ruum mille tagajärjel ei saa
turvavöö liiklusõnnetuse korral efektiivset kaitset pakkuda. Selle probleemi
lahendamiseks olid ELR turvavööd täiendatud ALR (Automatic
Locking Retractor)
funktsiooniga. Süsteemi eripära seisneb selles, et tõmmates turvavöö
täispikkuses välja, lülitub süsteem ümber ning turvavöö tagasi laskmisel ei
lase süsteem turvavööl jälle välja tulla. Seda süsteemi kasutades on võimalik
kinnitada lapse turvatool tihedalt auto istme vastu ilma, et see sõidu ajal
lõdvemaks läheks. Turvavööd on võimalik jälle välja tõmmata lastes sellel
kõigepealt lõpuni tagasi tõmbuda.
Sõiduki
turvavöösid kasutades lapsetooli kinnitamiseks, peab lapsevanem kindlasti
kasutama ALR süsteemi. ALR süsteemi olemasolu kohta omal sõidukil saab kasutaja
informatsiooni sõiduki kasutusjuhendist või sõiduki ametliku esindaja käest.
Samuti sisaldab tavaliselt seda informatsiooni turvavöö küljes olev
informatsiooni voldik.
Kuigi eelmises
alapeatükis kirjeldatud ALR ja ALR/ELR turvavööd tagavad oluliselt suurema
turvalisuse kui turvavööde algaastatel olnud käsitsi reguleeritavad turvavööd,
ei suuda nad siiski tagada seda, et turvavöö oleks alati tihedalt sõitja rinna vastu.
Probleeme võib näiteks tekkida talvisel ajal, kui inimesed kannavad pakse
riideid (turvavöö on lõtv ning tekib nn turvavöö lõtk) või lapse tooli
kinnitamisel ebapiisavast rihma pingutamisest. Sellest tulenevalt tekib
turvavöö ja inimese keha või lapsetooli ja auto istme vahele vaba ruum mille
võrra liigub inimene või lapsetool liiklusõnnetuse korral ettepoole. Ettepoole liiklumine
liiklusõnnetuses on ohtlik kahel põhjusel:
Ø Ettepoole
liikudes on oht, et esiistmel sõitja põrkab kokku sõiduki esipaneeliga või
avaneva turvapadjaga (mis võib väga ohtlik olla), ning tagaistuja põrkab kokku
sõiduki esiistmega.
Ø Ettepoole
liikudes liigub sõitja ette sõiduki sõidukiirusega mille vähendamine nullini
toimub väga järsku vaid turvavöö abil. Vastavalt Ameerika Ühendriikide liiklusohutuse
ameti (NHTSA) uuringutele, tekitab turvavöö sellisel juhul rasketes
liiklusõnnetuses tõsiseid kehavigastusi (marrastusi ja sinikaid) mis parenevad
väga aeglaselt
(tihedalt paigaldatud turvavöö puhul aga väheneb sõitja kiirus sujuvamalt koos
sõiduki kere deformatsiooniga mis vähendab turvavöö poolt tekitavate vigastuste
saamise tõenäosust).
Eesmärgiga
vältida turvavöö lõtku ning vähendada turvavöö pinget sõitja rinnale
liiklusõnnetuse korral, töötas maailma juhtiv sõidukite turvasüsteemide tootja
Autoliv Inc. (kelle koosseisu alates 1999.a. kuulub ka Eesti sõidukite
turvasüsteemide tootja Norma AS)
välja turvavööde eelpingutid. Eelpingutid pingutavad turvavöö sekundi murdosa
kiirusega kohe peale kokkupõrke algust kõrvaldades turvavöö lõtku. Tänu
turvavööde pingutamisele väheneb ka tõenäosus, et sõitja libiseb turvavöö
alumise rihma alla. Turvavööde pingutamine toimub pürotehnilise seadme abil mis
tavaliselt kasutab samu andureid mida kasutab turvapadja süsteem.
Esimesed pingutid oli Autoliv Inc poolt välja töötatud 1989.
Lisaks
turvavööde eelpingutitele oli Autoliv Inc välja töötanud turvavööde pinge
piirajad. Pingepiirajate eesmärk on aktiivselt neelata koormust hoides turvavöö
pinget eelnevalt seadistatud tasemel. See on võimalik tänu turvavöö
tagasitõmbamise rulli sisse sisseehitatud seadeldisele, mis võimaldab turvavööl
rullist nõrgalt ja kontrollitavalt välja tulla juhul, kui raske liiklusõnnetuse
käigus ületab istuja rinnale langev koormus teatud piiri. Pinge piiraja
olemasolu on oluliselt oluline eakate sõitjate puhul kuna uuringud on näidanud,
et 60ne aastase inimese rinnakorv peab vastu vaid poolele sellest koormusest
millele peab vastu 20ne aastase isiku rind. Esimesed pingepiirajad olid esitletud
1995.a. Hiljem olid pingepiirajad täiendatud kahaneva pingejõupiirajaga. Sellise
piirajaga varustatud süsteemis kokkupõrke algfaasis, kui sõitjat hoiab kinni
vaid turvavöö, hoiab süsteem turvavöö pinget suhteliselt kõrgel ühtlasel
tasemel. Kui sõitja hakkab lähenema turvapadjale, vähendab süsteem turvavöö
pinget mis välistab rinnale liiga suurt koormuse osutamist mis võib juhtuda
juhul kui turvavöö ja turvapadja pidurdusjõud täiendavad üks teist. Esimesed
kahaneva pingejõuga turvavööd olid esitletud 2000.a.
Vaatamata
eelpool kirjeldatud turvavööde eelpingutitele ja pingepiirajatele mis oluliselt
vähendavad turvavöö poolt vigastuste tekitamise tõenäosust, töötas Autoliv Inc
välja nn aktiivse turvavöö (Active Seatbelt). Aktiivse turvavöö eripära seisneb
selles, et selles kasutatakse ühekordse pürotehnilise laenguga eelpinguti
asemel mitmekordset kiirekäigulise elektrimootoriga eelpingutit, mis pingutab
turvavöö kiiremini kui 1/10 sekundi jooksul võttes
aktiveerimise aluseks ESP või BAS`i andurite andmeid. Tänu sellele on võimalik
varem alustada turvavöö lõtku eemaldamist, tehes seda efektiivsemalt ning
vähendades survet sõitja rinnale. Kuna pinguti ei ole ühekordne vaid
taaskasutatav, on võimalik turvavööde eelpingutamist kasutada
ettevaatusabinõuna situatsioonides kus sõiduki süsteemid ei suuda 100%lise
täpsusega tuvastada kas juhi tegevustele (nt äkkpidurdus) järgneb kokkupõrge
või mitte. Samuti tänu pinguti taaskasutatavusele on turvavööd vibades võimalik
seda kasutada juhi hoiatamiseks (nt Pre-Safe ja CMS süsteemides (vt töö punkti
1.1.8)) nt olukorras kus juht siseneb kurvi liiga suure kiirusega.
Aktiivse turvavöö eelist tavalise ja pürotehniliste eelpingutitega varustatud
vööde ees näitab joonisel 15 kajastatud graafik.
Joonis
15
Aktiivse
turvavöö eelised tavalise ja pürotehniliste eelpingutitega varustatud vööde ees
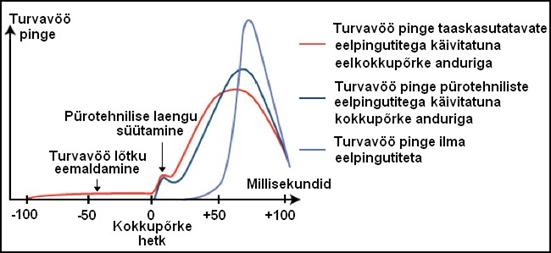
Allikas: Active seatbelts.
http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/seatbelts/active+seatbelts
Tänu edasisele turvavööde
arendamisele ning nende koostööle turvapatjadega, osutus võimalikuks veel vähendada
turvavöö poolt rinnale üle kantavat pidurdusjõu suurust ning kanda osa sellest
üle turvapadjale. Sellise koostöö käigus algab turvavööde töö nagu tavalistes
süsteemides turvavöö eelpingutamisega pürotehniliste või elektrilise
eelpingutitega. See välistab sõitja turvavöö alumise rihma alla libisemist ning
võimaldab hilisemas kokkupõrke faasis mõningat turvavöö lõdvestamist kui
rinnale mõjuv pidurdusjõud osutub liiga suureks. Tavalistes süsteemides
liituvad turvavöö ja turvapadja poolt rinnale üle kantavad pidurdusjõud kui
sõitja puudutab turvapatja. Koostöös töötavates süsteemides lülitub süsteem
sellel hetkel teisele, nö kergemale tasemele hoides pidurdusjõu suurust
suhteliselt ühtlasena (vt joonis 16). Seega väga tugevates kokkupõrgetes hoiab
süsteem ennast esimesel nö jäigemal tasemel natuke pikemat aega enne kui
lülitub teisele, kergemale tasemele. Sellist süsteemi nimetab selle arendaja
Autoliv Inc „Smart Belt“ ehk tark vöö.
Joonis
16
Smart Belt süsteemi pidurdusjõud
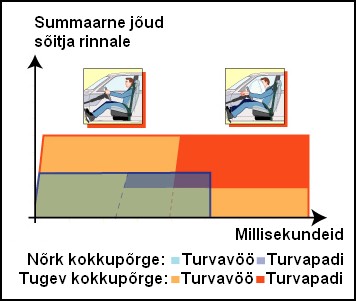
Smart Belt. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/seatbelts/smart+belt
Kui sõiduk on
varustatud sõitja kaalu tuvastamise süsteemiga, on võimalik kohandada turvavöö
pidurdusjõudu individuaalselt igale sõitjale. See on tähtis eelis kuna
väiksemad, kergemad sõitjad, nagu näiteks enamus naisi, on rohkem tundlikud
kõrgetele turvavöö pidurdusjõududele kui keskmine inimene, ning sellised
sõitjad ei vaja sama pidurdusjõudu nagu suuremad sõitjad.
Autoliv Inc
turvavööde eelpingutite ja pinge piirajate töö põhimõtet tutvustava videoga on
võimalik tutvuda tootja leheküljel:
http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/seatbelts/pretensioners
Kuigi eelmises
alapeatükis kirjeldatud tehnoloogiad muutsid turvavöö oluliselt turvalisemaks,
on need tehnoloogiad enamasti suunatud vaid eessõitjate kaitseks, kuna töötavad
tavaliselt koostöös turvapatjadega (nn Smart Belt (vt
töö punkti 1.2.2.b)). Ford`i insenerid on arendanud tagumisi turvavöösid samuti
sõitja rinnale mõjuva jõu vähendamise suunas, kuid saavutasid selle turvavöö
oluliselt suurema pinna kaudu. 2009.a. esitles Ford esimesena auto maailmas
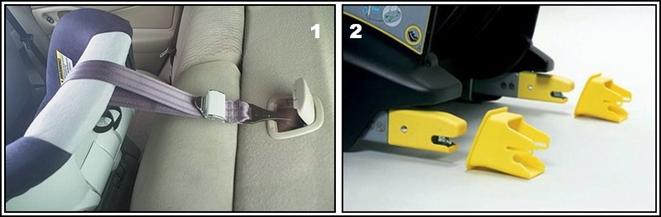
täispuhutavaid turvavöösid (vt joonis 17).
Joonis
17
Fordi
tagumised täispuhutavad turvavööd

Allikas: Ford's Inflatable Safety Belts.
http://www.youtube.com/watch?v=MN5htEaRk4A&feature=related
Turvavööd olid
välja töötatud tagamaks lisakaitset taga istujaile kelleks tihti on lapsed ja
eakad inimesed ning kelle pea, rind ja kael on vähem kaitstud. Turvavööde
esitlemisel 2009.a. teatas Ford, et täispuhutavaid turvavöösid hakatakse
paigaldama alates 2010.a. Explorer mudelile. Hiljem plaanib Ford täispuhutavaid
turvavöösid paigaldada kõikidele mudelitele. Täispuhutavate turvavööde eeliseks
on see, et turvavöö poolt rinnale üle kantav pidurdusjõud hajutatakse 5 korda
suurema pinna peale võrreldes tavalise turvavööga. See võimaldab vähendada
survet tagaistujate rinnale ning kontrollida pea ja kaela liikumist.
Interneti
leheküljel www.youtube.com on võimalik leida Fordi täispuhutavate turvavööde
tööd ja eeliseid demonstreerivaid video filme. Käesoleva töö autori poolt
soovitatav asub aadressil: http://www.youtube.com/watch?v=MN5htEaRk4A&feature=related
Esimene auto
lapsetool oli esitletud 1963.a. Bertil Aldman`i poolt. Tema soovitas paigaldada
istet esiistme peale seljaga sõidusuunas. Selle ja teiste ideede arendamiseks
kuulus 20.a. enne kui 17.10.1982.a. oli vastuvõetud reegel ECE R 44/01 milles
olid sätestatud lastetoolidele ning nende katsetustele esitatavad nõuded.
Edasine töö väikeste sõitjate kaitse suunas tõi nähtavale jäiga lastetooli auto
külge kinnitamise vajaduse. Ühtlustamaks kõik erinevad tooli jäiga kinnitamise
variandid oli 1990.a. rahvusvahelise institutsiooni ISO poolt kinnitatud
standart Isofix mis oli 07.08.1995 ametlikult kinnitatud uutes ECE R 44/03
reeglites.
Väliselt
erinevad Isofix kinnitusega toolid tavalistest toolides kahe kompaktse lukuga
mis asuvad tooli alumises tagumises nurgas (vt joonis 18). Terasest lukukeeled
kinnituvad istme seljatoe ja padja vahel asuva 6 millimeetriste varraste külge.
Istme paigaldamiseks on vajalik vaid istme klõpsamine varraste külge ning
lükata iste tugevalt auto istme vastu. Istme maha võtmine on veelgi lihtsam.
Selleks on vaid vajalik tooli lukukeeled vabaks lasta. Lukukeelte koormuse
vähendamiseks ning tooli nurkliikumise piiramiseks on toolil olemas täiendav
vöö nn ankur kinnitusega (top tether) mis hoiab kinni
tooli ülemist osa. Tooli paigaldamiseks on vajalik ankurvöö kinnitada selleks
ettenähtud kohta (vt joonis 18).
Vastavalt ECE R 44/04 reeglitele läbiviidud erinevate tavaliste ja Isofix
kinnitustega lastetoolide testi käigus selgus, et Isofix kinnitusega varustatud
toolid tagavad lastele oluliselt suurema turvalisuse. Nt väikseim
katsemannekeeni „rinnale“ mõjuv pidurdusjõud oli Isofix kinnitusega varustatud
toolil 43g mis on 12g võrra väiksem maksimaalsest reeglitega lubatud määrast. Halvim
tavalise kinnitusega tooli tulemus oli aga 77g (väga suur traumade ja
vigastuste saamise tõenäosus). Samuti olid Isofix kinnitustega varustatud
toolide näitajad parimad tooli sõidusuunas nihkumise mõõtmisel. Isofix`i parim
tulemus 77mm ja tavakinnituse parim tulemus 122mm ning halvim tulemus 234mm. Selgroo
kokku surumise jõu mõõtmisel selgus, et vaid ühe 8st tavakinnitusega turvatooli
jõud mahtus lubatud 30g piiridesse. Kõikide Isofix kinnitusega turvatoolide
jõud jäid lubatud 30g piiridesse.
Vaatamata eelistele (kiirem ja lihtsam paigaldus ning väiksemad kehale
mõjuvad jõud liiklusõnnetuse puhul) on Isofix kinnitusel ka negatiivseid külgi.
Raske liiklusõnnetuse puhul rakendub terasest vartele suured jõud kuid varte
tugevus on piiratud. Selle tõttu on Isofix kinnitustega toolis veetava lapse
maksimaalne kaal piiratud 18 kilogrammiga. Samuti on uuemate ECE R 44/04 reeglitega piiratud tooli enda kaal 15 kilogrammiga.
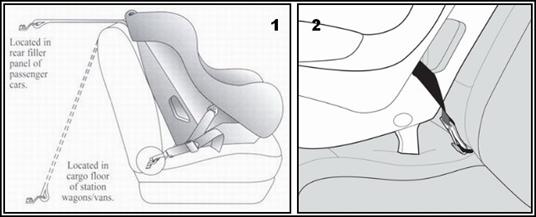
Joonis
18
Isofix
kinnitusega varustatud tool: 1- ülemine top tether
kinnitus; 2- alumised
Isofix
lukud (lukkude ees on plastmassist suunajad kergemaks paigaldamiseks).
Allikas: Крепление
ISOFIX. http://www.avtodeti.ru/?t=43&s=140
Mõned lastetoolide tootjad (nt Maxi-Cosi) on
loonud võimaluse kinnitada jäigalt ka turvahälle ehk seljaga sõidusuunas
paigaldatavaid toole. Selleks kinnitatakse autosse Isofix kinnituste abil alus
millisele kinnitatakse turvahäll (vt joonis 19). Süsteemi on väga mugav
kasutada kuna alus vajab kinnitamist vaid üks kord selle sõidukisse
paigaldamisel. Alusele turvahälli paigaldamine ja maha võtmine ei nõua
täiendavaid tegevusi hälli kinnitamiseks. Sellise aluse kinnitamine erineb
näoga sõidusuunas kinnitatavast toolist sellega, et ülemise ankur kinnituse
asemel on sellel jalg (vt joonis 19). Süsteemi puuduseks on see, et sellise
aluse esiistmele paigaldamine on võimalik vaid juhul kui sõiduki parempoolne turvapadi
on väljalülitatav. Samuti ei ole võimalik alust paigaldada istmekohtadele
milliste ees on põrandasse sisseehitatud laekad kuna aluse jalg peab toetuma
tugevale põrandale mitte laeka kaanele.
Joonis 19
Turvahäll ja selle alus Isofix kinnitusega

Allikas: EasyFix. http://www.maxi-cosi.com/gb-en/carseats/baby/easyfix
Rõhumaks Isofix
lastetoolide kinnituste eeliseid, näeb EuroNCAP`i metoodika ette avariitestide
käigus lisapunktide andmist sõiduki esimesel parempoolsel istmel Isofix
kinnituste olemasolu ja väljalülitatava turvapadja eest.
Lisaks eelpool kirjeldatud Isofix kinnitustega lastetoolidele võib kohata
ka LATCH kinnitusega lastetoole. LATCH (Lower Anchors and
Tethers for Children) puhul on tegemist toolidega mille kinnitamiseks
kasutatakse autos samu kinnituskohti mis Isofix`i kinnituste puhul, kuid tooli
alumine osa kinnitatakse samasuguse ankur kinnitusega nagu Isofix`i ülemine osa
(vt joonist 18.1 ja 20.2). LATCH nime all kasutatakse süsteemi peamiselt
Ameerika Ühendriikides. Süsteem on samuti tuntud LUAS (Lower
Universal Anchorage System) ja Canfix nimede all Kanadas. Kasutatakse ka
UCSSS (Universal Child Safety Seat System) lühendit.
Kuid LATCH, LUAS, Canfix ja UCSSS süsteemid ei ole Euroopas levinud.
Joonis
20
LATCH
süsteemi kinnitused: 1-LATCH süsteemi kinnituskohad; 2-LATCH
alumine ankur kinnitus
Allikas: Система
крепления
детских
автокресел LATCH.
http://www.babysale.ru/ncd-1-1-110/news.html
Töö kirjutamise
aastal saab sõiduki turvapadi 30 aastaseks. Detsembris 1980.a. oli esmakordselt
maailmas Mercedes-Benz S klassi mudelil esitletud turvapadi mis töötas koostöös
turvavöödega ning täiendas neid.
Kuid turvapadja ajalugu võttis alguse oluliselt varem.
Esimesed
sõidukite turvapatjade patendid olid väljastatud veel 1953.a. sakslasele Valter
Linderer`ile ja ameeriklasele John Hetrick`ile. Kuid toona ei teadnud veel
leiutajad kuidas „avarii puhul automaatselt täispuhutava kokkupakitud kotti„
ideed tehniliselt realiseerida.
1968.a. leiutas ameeriklane
Allen Breed elektromehaanilise turvapadja juhtimise süsteemi. Kohe peale seda
alustati turvapatjade katsetusi mõlemal pool ookeani – Daimler-Benz poolt
Euroopas ja GM`i ja Ford`i poolt Ameerikas. Katsetuste erinevus seisnes selles,
et ameerika tootjad pidasid turvapatja peamiseks turvavööga mitte kinnitatud
sõitjat kinni hoidvaks süsteemiks, kuid saksa tootja pidas turvapatja vaid
turvavöösid täiendavaks süsteemiks.
1970ndatel
aastatel tekkisid Ameerika Ühendriikides esimesed turvapatjadega varustatud
sõidukid mis olid ettenähtud munitsipaalasutuste poolt katsetamiseks. Näiteks
1973.a. varustati turvapadjaga 1000 Chevrolet Impala katsesõidukit ning Oldsmobile
Toronado`le oli paigaldatud kohe kaks turvapatja (juhi ja kõrvaistuja oma).
Kuid samal aastal suri kõrvalistuja turvapadjalt saadud vigastuste tõttu
turvavööga kinnitamata laps mis järsult pidurdas turvapatjade arengut Ameerika
Ühendriikides. Rootsi tootja Volvo oli isegi läbi viinud katsetusi mille käigus
turvavööga kinnitamata sigade (kelle kaal sarnanes väikeste laste omaga)
turvapadjaga kaitsmisel sai 24st seast raskelt vigastada 13 siga ning 8 sai
surma.
Kuid erinevalt
ameeriklastest mõistsid nii rootslased kui ka sakslased, et turvapadjad ja
turvavööd peavad töötama koostöös. Esimesena sellises koostöös töötavat
süsteemi hakkas massiliselt pakkuma Daimler-Benz. Perioodil 1967…1980.a. oli
Daimler-Benz läbi viinud 250 reaalset avarii testi ning mitu tuhat muud
eksperimenti (nt kõrvade helikoormuse testid turvapatjade avamise hetkel).
Tänaseks on
turvapatjadest saanud loomulik ja tavaline sõiduki passiivse turvalisuse
element ning turvapatjade kogus ühes sõidukis võib ületada 10t. Samuti suudavad
tänapäeva turvapatjade süsteemid tuvastada sõitja olemasolu ja muuta oma
efektiivsust vastavalt olukorrale. Turvapadjad on ka aset leidnud
mootorratastel (vt töö punkti 1.2.3.c), mootorratturite riietes (vt töö punkti
1.2.3.c) ja sõidukite turvavöödes (vt töö punkti 1.2.2.c).
Turvavöö
kasutamise puhul vähendab juhi turvapadi surmajuhtumite arvu 25% võrra ning
tõsiseid pea vigastusi üle 60% võrra. Tänu sellele, et juhi kõrvalistuja asub
sõiduki esipaneelist oluliselt kaugemal kui juht roolist, on kõrvalistuja
turvapadja kasukoefitsient madalam, kuid ka seal suudab turvapadi vähendada
surmajuhtumite arvu 20% võrra.
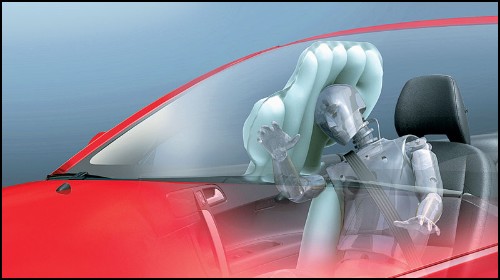
Eesmised
turvapadjad on sõiduki eessõitjate kaitsesüsteemi lahutamatu osa. Asudes
juhtimisroolis ja/või sõiduki esipaneelis, avanevad need frontaalkokkupõrke
juhul eesmärgiga kaitsta juhti ja kõrvalistujat. Turvapadja avanemiseks kulub
mõni kümnendik sekundist. Turvapadjad on vaid täiendavad inimest kinni hoidvad
elemendid ning on projekteeritud andma parema tulemuse koostöös turvavöödega.
Selle tõttu ei vabasta turvapatjade olemasolu turvavöö kasutamisest.
Turvapatjade
tööpõhimõte on järgmine. Kokkupõrke alguses saadavad andurid elektroonilise
juhtseadme (inglise keeles kannab nime Electronic Control Unit
ehk ECU) mikroprotsessorile signaale. Saadud signaalide alusel tuvastab juhtseade
kokkupõrke tugevust ning juhul kui see ületab teatud piiri, saadab süsteem
turvapadja sütikule elektrilise impulsi. Sütik käivitab keemilise reaktsiooni
mille käigus tekkiv gaas täidab turvapadja täielikult kuni 50/1000
sekundi jooksul. Edasijõudnud süsteemid suudavad kohandada turvapadja avanemist
arvestades kokkupõrke tugevust, sõitjate mõõtusid ja isegi isteasendit.
Viimases lauses nimetatud süsteemi paigaldatakse nt Jaguar XK`le alates
2001 aastast. Süsteem, mille nimi on ARTS (Adaptive Restraint
Technology System ehk adaptiivse surve tehnoloogia süsteem), kujutab
endast ette andurite kogumit mis on ühendatud ühte võrku juhtseadmega,
turvapatjade ja turvavöödega. Neli andurit jälgivad pidevalt autojuhi ja
kõrvalistuja asendit (vt joonist 21) ning seda, kas nende turvavöö on
kinnitatud või mitte. Lisaks sellele tuvastavad andurid juhi ja rooli ning
kõrvaistuja ja esipaneeli vahemaa suurust. Kokkupõrke juhul „otsustab“ süsteem 1/100
sekundi jooksul millised turvapadjad tuleb avada, kas avada neid täies ulatuses
või osaliselt ning seda, kas tuleb aktiveerida eelpingutid või mitte. Kui
kõrvalistuja istub liiga lähedal esipaneelile süttib ohu tuli ning turvapadi
lülitub välja (kokkupõrke juhul see ei avane kuna võib tõsiselt vigastada
sõitjat). Nii pea kui kõrvalistuja nihutab ennast piisavalt tahapoole, lülitub
turvapadi automaatselt sisse.
Joonis
21
ARTS
süsteemi jälgimisandurid
Allikas: К. Максимов.
«Мыслящие»
подушки
безопасности.
2000. Авторевю, nr 18 (227), juuli
Tavaliselt on turvapadjad ristlõikes ringikujulised ning parimal juhul on
varustatud mitme avamise tasemega (nt ARTS süsteemis). Sõltuvalt turvapadja
avanemise tasemest võib turvapadja pindala muutuda (nt suureneda tugevates
kokkupõrgetes ning väheneda kergemates) tänu millele on rasketes
liiklusõnnetustes võimalik üle kanda pidurdusjõudu suuremale kehapinnale
vähendades koormust rinnale ja teistele kehaosadele. Kuid sõltumata turvapadja pindalast,
on osa pidurdusjõust alati suunatud sõitja pea piirkonda. Vältimaks näo
piirkonna (silmad, nina, huuled, lõug) vigastusi, on autotootjad töötanud
erinevate turvapatjade kujude suunas. Üks viimaseid leiutisi selles suunas on Toyota
poolt leiutatud Twin-chamber Airbag ehk kahe kambriline
turvapadi.
Kahekambriline
turvapadi koosneb kahest poolest milliste vahelisse sügavikku (vt joonis 22)
toetub sõitja kokkupõrke juhul peaga. Süsteemi mõte seisneb selles, et tänu
sellele suureneb pindala millega sõitja toetub padjale, ning seeläbi vähenevad
ka sõitja kehale mõjuvad pidurdusjõud. Lisaks sellele kandub osa jõus sellise
turvapadja puhul sõitja õlgadele mis on võimelised vastu võtma suurema osa
pidurdusenergiast kui nägu ning tänu sellele väheneb näo piirkonna vigastuste
tõenäosus.
Kahjuks pole sellise padja massiline kasutamine mõeldav, kuna oma
asümmeetrilisuse tõttu peab see avanema täpselt ette programmeeritud suunas
ning selle tõttu saab seda kasutada vaid sellistes autoroolides, mille keskmine
osa jääb rooli keeramisel paigale (joonisel 22 on turvapadi kajastatud vasakul
kuna tegemist on paremal pool asuva rooliga autoga).
Joonis
22
Kahe
kambriline turvapadi

Allikas: Безопасная
инициатива. 2005.
Авторевю, nr 21 (345), oktoober
Töös kirjeldatud
turvavööde ja turvapatjade ja nende koostöö süsteemid on eeskätt suunatud sõitja
elu päästmiseks ja keha ülemise osta vigastuste vähendamiseks. Mingil määral
tänu nendele süsteemidele on kaitstud ka sõitja jalad (eelpingutid mis
vähendavad nn sukeldumise efekti (alumise rihma alla libisemine)), kuid teatud
autode füüsiliste eripärade tõttu ei suuda eelpingutid tagada sukeldumise
efekti vähenemist. Sellisteks sõidukiteks on näiteks kolmeukselised luukpära
kere tüübiga sõidukid kus kere iseloomu tõttu (pikad uste avad) asuvad
turvavööde kinnituskohad selliselt, et sukeldumise efekti vähenemist vaatamata
eelpingutite olemasolule ei toimu. Samuti on suur „sukeldumise“ oht pool pikali
sõitvatel sõitjatel. Sellistes sõidukites või pool pikali asendis olles
liiklusõnnetusse sattumisel on sõitjal oht saada tõsiseid keha alumise osa
vigastusi mille tagajärjel ei pruugi inimese kõndimisvõime peale rasket
liiklusõnnetust taastuda.
Et sõiduki
kaitsesüsteemide eesmärk ei piirduks sõitjate elu päästmisega, vaid oleks
tagatud ka sõitjate täielik liikumisvõime ka peale rasket liiklusõnnetust, tõi
Autoliv Inc esimesena maailmas 1996.a turule põlve turvapadja (Knee Airbag. (vt
joonis 23)). Selles valdkonnas töö arendamise tingis asjaolu, et Autoliv Inc
andmete kohaselt on turvavöödega ja turvapatjadega varustatud sõidukite
sõitjate jalgade vigastused frontaalsete kokkupõrgete kõige sagedamini esinev
probleem. Need moodustavad sõitjatele 40% keskmistest ja raskematest
vigastustest ning üle 60% vigastustest saadakse allapoole põlve.
Joonis
23
Põlve
turvapadi

Allikas: Lower Body
Protection.
http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/frontal+airbags/lower+body+protection
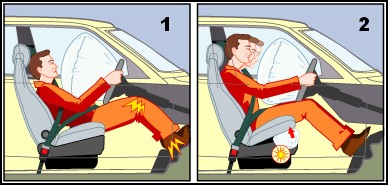
Sõidukite jaoks,
millistel eelpingutid ei vähenda “sukeldumist”, on välja töötatud täiendavad
turvapadjad, mille eesmärk on vähendada nn sukeldumise efekti ning see läbi
hoida sõitja jalgu võimalikult kaugel sõiduki esipaneelist. Selliseid
turvapatju nimetatakse libisemise vastasteks turvapatjadeks (Anti-Sliding
airbag)
ning need asuvad istme padja sees põlvede taga (vt joonis 24). Kokkupõrke
toimumisel avaneb selline padi istme padjas, tekitades padjas küüri mis
takistab keha libisemist alumise turvavöö rihma alla (vt joonis 25). Selliseid
turvapatju paigaldatakse nt kolmeukseliste Renault Clio mudelitele.
Joonis
24
Libisemise
vastase turvapadja asukoht ning tööpõhimõte
Allikas: Михаил
Подорожанский.
Аксидентология.
2002. Авторевю, nr 12 (268), juuni
Joonis
25
Libisemise
vastase turvapadja eesmärk
Allikas: Lower Body
Protection.
http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/frontal+airbags/lower+body+protection
Külgkokkupõrgetes
saadavate vigastuste osakaal moodustab umbes neljandiku kõikidest sõidukite
liiklusõnnetustes saadud vigastustest, kuid need moodustavad rohkem kui
kolmandiku kõikidest tõsistest või surma põhjustavatest vigastustest. Selle
peamine põhjus seisneb selles, et sõiduki külg on väga peenike ning sellel
puudub materjal mis kokkupõrke käigus lömastudes võiks neelata kokkupõrke
energiat.
Kõik eelpool
kirjeldatud turvapadjad on suunatud sõitjate kaitseks frontaalse kokkupõrge
tagajärjel. Külgkokkupõrgete käigus tekkida võivate vigastuste vältimiseks on
tänapäeva sõidukid varustatud külgmiste turvapatjadega ja turvakardinatega. Külgmised
turvakardinad on suunatud vähendama kokkupõrge poolsete sõitjate eluohtlike pea
vigastusi. Külgmised turvapadjad on suuantud vähendama tõsiseid rinnapiirkonna
vigastusi ning täidavad oma eesmärki umbes 25% külgkokkupõrgete puhul. Esimene
külgturvapadi oli esitletud 1994.a.
Külgmiste
(nimetatakse ka rinna või rindkere ehk chest või thorax Airbag. (vt joonis 26))
turvapatjade kaitse efekt seisneb selles, et see hoiab sõitjat eemale kokkupõrge
piirkonnast samal ajal, kui toimub kokkupõrke energia summutamine sõiduki külje
lömastamise käigus. Kuna sõitjat hoitakse eemale sõiduki kortsumise kohast, on
mingil määral tagatud ka sõitja peakaitse, kuid pea paremaks kaitseks on siiski
vajalikud täiendavad pead kaitsvad turvapadjad.
Külgturvapadi avaneb 12/1000 sekundi jooksul mis on
4 korda kiirem kui eesmiste turvapatjade avanemise kiirus. Padi avaneb alati
kindlal kokkupõrke ajahetkel ning tavaliselt avaneb siis kui külgmine
kokkupõrke kiirus on suurem kui 15…20 km/t. Kokkpõrke andur, mis on ühendatud
elektroonilise juhtseadmega, asub tavaliselt esiistme seljatoes. Sõidukitel,
millel külgmine turvapadi asub ukse sees, asub ka kokkupõrke andur ukse sees
või juhi ukse järgses postis. Padja maht on tavaliselt piiratud 12 liitriga
eesmärgiga teha see võimalikult pehmeks kuid samas piisavalt efektiivseks, et
oleks tagatud vajalik kaitse.
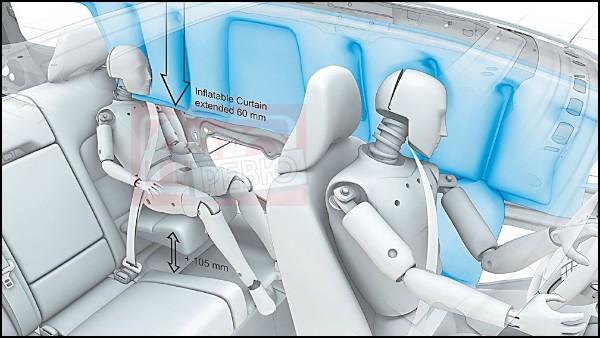
Nagu eelpool mainitud sai, on pea paremaks kaitsmiseks lisaks külg
turvapadjale vajalik täiendav pead kaitsev turvapadi. Sellist turvapatja
nimetataks turvakardinaks (Inflatable Curtain)
kuna see katab tavaliselt kogu sõiduki külgmist ülemist osa (vt joonis 27).
Kardinad võivad olla ehitatud selliselt, et kaitsevad vaid eesistujat, nii
eesistujaid kui ka tagaistujaid või katavad tervet auto külge (vajalik nt kui
sõidukis on 3 istmerida).
Külgkardinaid on
olemas kahte tüüpi. Esimene on projekteeritud neelama otsese külgkokkupõrke
energiat (nn esimene kokkupõrge) ning teine on projekteeritud summutama lööke
kuni 6 sekundi jooksul alates avanemisest, mis on vajalik nt sõiduki üle katuse
rullumisel või kui esimesele kokkupõrkele järgneb teine.
Joonis
26
Külgmine
turvapadi

Allikas: What is in a
seat?
http://www.i-car.com/html_pages/technical_information/advantage/advantage_online_archives/2004/092704.shtml
Joonis
27
Turvakardin
Allikas: Олег
Растегаев.
Детское
место. 2007.
Авторевю, nr 11 (382), juuni
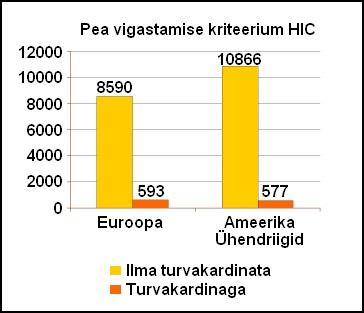
Turvakardin on
pakitud katuse nurka mööda uste äärt ning avaneb 25/1000
sekundi jooksul mis on neli korda kiirem kui inimese silmapilk. Kardin eraldab
sõitja pead sõiduki tugevatest elementidest (nagu näiteks ukse järgne post)
võimaldades oluliselt vähendada nn pea vigastuse kriteeriumit (HIC – Head
Injury Criterion). Tänu turvakardinatele on võimalik vähendada HIC määra 90%
võrra (vt joonis 28) mis toob kaasa eluohtlike pea vigastuste saamise tõenäosuse
vähendamise 50% võrra.
Joonis
28
Turvakardina
mõju HIC näitaja vähendamisele
Allikas: Inflatable Curtain
http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/side-impact+airbags/inflatable+curtain
Kuna osadel
sõidukitel ei ole võimalik turvakardinat kasutada (nt kabriolett kerega
sõidukid), siis kasutatakse sellistes sõidukites sõitjate kaitseks teist liiki
turvapatju. Üks sellistest on nn pea-rinna turvapadi (Head-Thorax bag)
mille puhul on tegemist tavalise külgmise turvapadjaga millel on lisatud
täiendav kamber mis kaitseb sõitja pead. Kuid kuna pead kaitsva kambri pindala
on väike, ei suuda selline padi tagada piisavat kaitset. Parema kaitse
tagamiseks on hakatud sellistes sõidukites paigaldama uksesisest turvakardinat
(Door Mounted Inflatable Curtain. (vt joonis 29)). Tänu
turvakardina kambrite erilisele ehitusele on selliste turvakardinate jäikus
võrreldav tavaliste turvakardinate jäikusega ning need tagavad võrdse kaitse ka
sõiduki ümber katuse rullumisel.
Turvakardinate
efektiivsus on tunnistatud nii suureks, et alates 2013.a. keelatakse Ameerika
Ühendriikides sellise turvapadjaga varustamata uute sõidukite müüki. Töö
kirjutamise hetkel on nii Euroopas kui ka Ameerikas turvakardinatega varustatud
sõidukite osakaal 60%.
Joonis
29
Uksesisene
turvakardin kabriolett kere tüübiga sõidukis
Allikas: Павел
Карин.
Эпицентр
безопасности. 2005.
Авторевю , nr 19 (343), august
Uuringute
kohaselt kõikidest mootorratastega juhtunud liiklusõnnetustes milles sai
vigastada või surma mootorrattur moodustavad 68% frontaalsed kokkupõrked.
Selle informatsiooni taustal on loogiline, et esimesena maailmas
seeriatootmisesse jõudnud mootorratta turvapadi osutus eesmiseks turvapadjaks.
Esimesena maailmas pakus lisavarustusena turvapatja mootorrattale Honda oma mudelile
Gold Wing. Süsteemi kokkupõrge andurid on paigaldatud esihargi torudele.
Turvapadi, mille maht on 150l, avaneb juhi ees (vt joonis 30) ning omab natuke
nõgusat kuju mille eesmärk on juhti paremini kinni hoida. Padi avaneb 0,06
sekundi jooksul.
Interneti
leheküljel http://www.world.honda.com/motorcycle-picturebook/Airbag on võimalik
põhjalikult tutvuda Honda mootorratta turvapadja töö põhimõttega ning selle
eripäradega.
Lisaks
mootorratastele on tänapäeval turvapadjad jõudnud ka mootorratturite riietesse.
Turvapatju kasutatakse mootorratturite jopedes (vt joonis 31) eesmärgiga
vähendada mootorratturi mootorrattalt kukkumise tagajärjel tekkivaid vigastusi.
Jopes on selja, kaela ja rinna piirkonnas sisseõmmeldud täispuhutavad kihid mis
on ühendatud gaasiballooniga. Krae piirkonnas oleva padja eesmärk on suruda
padja avanemisel juhi pea rinna vastu vähendamaks kaelalülide vigastamise
tõenäosust. Gaasiballooni kaitseseade üks ots ühendatakse mootorrattale istudes
ratta külge. Mootorratturi rattalt kukkumisel tõmbub kaitseseade
gaasiballoonist välja ning padjad täituvad gaasiga.
Joonis
30
Honda
Gold Wing turvapadi
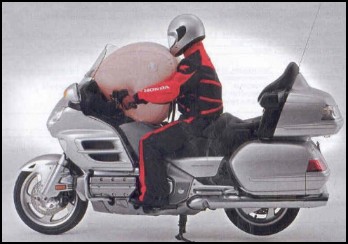
Allikas: Александр
Воронцов.
Правим
бритвы,
взбиваем
подушки! 2005. Motor, nr 11, november
Joonis
31
Mootorratturi
jopesse integreeritud turvapadi: 1-täispuhutavad kihid; 2-gaasiballon
ja selle kaitseseade
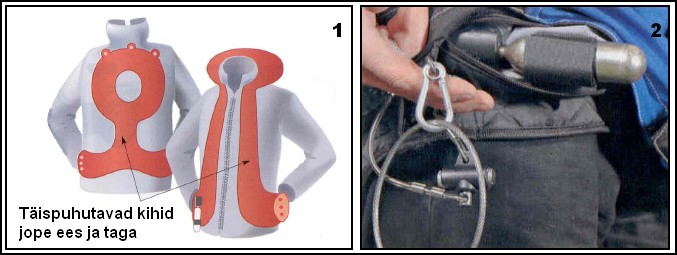
Allikas: Наталья
Умнова. С
персональной
подушкой. 2005. Мото,
nr 3, märts
Nn piitsaplaksu
vigastusi, ehk pea järsu liikumise tagajärjel tekkivaid selgroo vigastusi
(edaspidi kaela vigastus), peetakse juristide poolt mitte märkimisväärseks
tervise vigastuseks kuna neid on tihti raske, ja vahel isegi võimatu,
diagnoosida. Kuid kaelavigastuste ravimisele, mis tihti osutub väga pikaks ja
kalliks, kulutatakse vaid Rootsis mitu sada miljonit eurot aastas. Selle tõttu
oli Rootsi transpordi ministeeriumi poolt EuroNCAP`ile tehtud ettepanek, mille
tagajärjel käesoleva töö punktis 1.2.1 kirjeldatud EuroNCAP`i testidele
lisandus alates 2008.a
(vt lisa 1) tagant otsa sõidu kaitse ehk kaelavigastuste test. Testi käigus hinnatakse
sõidukite esiistmete suutlikust kaitsta sõitjaid kaelavigastuste saamise eest
tagant otsasõidu puhul.
Iga istmega
viiakse läbi kolm testi. Testide reeglite väljatöötamisel oli arvestatud
kindlustusseltside statistikaga mille kohaselt suurim osa kaelavigastusi
saadakse liiklusõnnetuses kus kokkupõrke hetkel oli sõidukite kiiruse vahe kuni
16 km/t. Selle tõttu on esimese testi (mis imiteerib kerget tagant otsasõitu)
kiirus 16 km/t ja aeglustus toimub kiirusega 5g. Teine test (keskmise
raskusega otsasõit) toimub samuti kiirusel 16 km/t kuid aeglustus toimub
kiirusega 10g. Raske tagant otsasõidu imiteerimisel on kiirus 24 km/t ja
aeglustus 7,5g. Iga test viiakse läbi uue istmega ning testide käigus
mõõdetakse peale ja kaelalülidele mõjuvate jõudude suurust.
Testide käigus
on selgunud, et aktiivsetel peatugedel (mis tagant otsasõidu puhul automaatselt
lähenevad peale) puuduvad selged eelised tavaliste peatugede ees mille tõttu nt
Volvo loobus alates mudeli XC60 tootmisest aktiivsetest peatugedest.
Peamiseks
kaelavigastusi vähendavaks elemendiks auto esiistmes on peatugi, kuid ka parim peatugi
suudab kaitset pakkuda vaid juhul kui see on õigesti reguleeritud. Rõhumaks
peatugede õige reguleerimise tähtsust kaelavigastuste vähendamiseks, antakse
EuroNCAP`i kaelavigastuste testide käigus istmetele lisapunkte. Ühe punkti saab
peatoe reguleerimissüsteemi lihtsuse eest (kusjuures täispunkti on võimalik
saada vaid juhul, kui peatoe alumises asendis on peatoe kõrgus piisav, et
tagada teatud kaitse taset, või juhul kui peatugi on varustatud kõrguse
automaatse reguleerimise süsteemiga). Teise punkti saab peatoe geomeetriliste
näitajate eest – mida kõrgem on maksimaalne võimalik peatoe kõrgus ning mida
lähemal on see sõitja kuklale, seda suurem tõenäosus on saada täispunkti.
Just tulenevalt asjaolust, et vaid õigesti reguleeritud peatugi suudab pakkuda
piisavat kaitset, on Volvo C70 peatoed paika pandud tehases ning on mitte
reguleeritavad.
EuroNCAP`i
spetsialistide sõnade kohaselt parima kaitse tagamiseks peab peatoe ülemine äär
olema peast kõrgemal või vähemalt sellega ühel tasemel ning olema mitte
kaugemal kui 4 cm kaugusel kuklast. Joonisel 32 on illustreeritud peatoe õige,
halb ja vale asendid. Parima kaitse tagab rohelises piirkonnas asuv peatugi
ning halvima, punases piirkonnas asuv peatugi (peatugi on peast vähemalt 80mm
madalamal ja vähemalt 100mm kaugusel kuklast).
Joonis
32
EuroNCAP
spetsialistide poolt soovituslik peatoe asend (roheline piirkond)
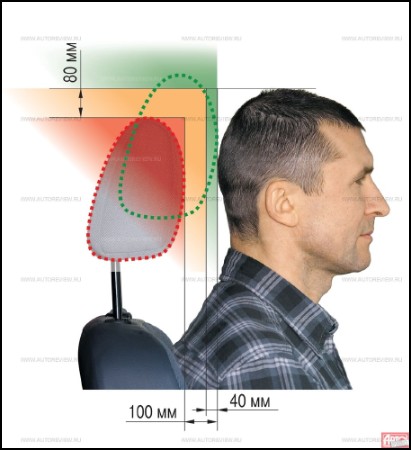
Allikas: Юрий
Ветров.
Берегите шею! 2009.
Авторевю, nr 4 (421), märts
Järgmine joonis
(vt joonis 33) illustreerib istme eripära ja peatoe õige asendi tähtsust
kaelavigastuste vältimiseks. Joonise paremal poolel on EuroNCAP`i testi käigus
3,5 punkti kogunud iste (töö kirjutamise hetkel on testide käigus suurim saadud
punktide arv 3,7)
ning vasakul poolel on viimase koha saanud iste. Piltide võrdlemisel on hästi
näha, et „tagant otsasõidu“ tagajärjel on viimase koha saanud istmel olev
mannekeen eraldunud istmepadjast oluliselt kõrgemale ning madala peatoe tõttu
nihkus tema „pea“ peatoe taha, mille tagajärjel oluliselt suureneb
kaelavigastuste saamise tõenäosus.
Joonis
33
Õigesti ja
valesti reguleeritud peatugede võrdlus: 1-valesti reguleeritud peatugi
(pea on nihkunud peatoe taha ning kael on oluliselt paindunud tahapoole); 2-
paremat kaitset pakkuv iste ning õigesti reguleeritud peatugi (kael on
sirge).

Allikas: Юрий
Ветров.
Берегите шею! 2009.
Авторевю, nr 4 (421), märts
Eessõitjate kaelavigastuste tõsiduse vähendamiseks on Autoliv Inc välja
töötanud süsteemi mis sõidukile tagant otsassõidu puhul võimaldab istme
seljatoel nihkuda teatud ulatuses allapoole (vt joonis 34) summutades
kokkupõrge energiat ning vähendades sõitja kaelale ja peale mõjuvaid jõudusid.
Kiirusel 24 km/t läbi viidud testide käigus oli tuvastatud, et sellise süsteemi
kasutamine toob kaasa kaela vigastuste saamise tõenäosuse vähendamise 50%
võrra.
Joonis
34
Tagant
otsasõidu kokkupõrke energiat neelava süsteemi tööpõhimõte
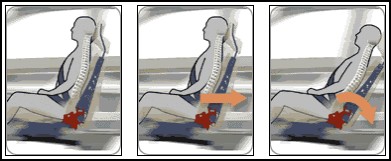
Allikas: Anti-Whiplash Seat.
http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/Anti-Whiplash%20Seat
EuroNCAP`i poolt
läbi viidud kaelavigastuste testide tulemustega on võimalik tutvuda interneti
leheküljel: http://www.euroncap.com/whiplash.aspx
Nagu eelpool mainitud sai, jagunevad sõiduki turvasüsteemid
kaheks – aktiivseteks ja passiivseteks. Esimesed aitavad kokkupõrget vältida,
kuid kui seda vältida ei õnnestunud, hakkavad tööle sõiduki passiivsed
turvasüsteemid milledest esimesena hakkab tööle kokkupõrke energiat neelav
kere. Kere hakkab purunema, kuid mitte sihitult, vaid vastavalt eelnevalt
täpselt paika pandud plaanile. Kere metall kortsub „programmeeritult“, eesmärgiga
kustutada kokkupõrke energiat ning vältida salongi kuju muutumist.
Viimases lauses kirjeldatud protsess (tugev salongi puur
ning deformeeruv kere. (vt joonis 35)) on peamine passiivse turvalisuse
printsiip mis on välja töötatud ja patenteeritud Austria inseneri Bela Barenyi
poolt 1952.a.
Nimetatud
printsiip on tänapäeval aluseks kõikide sõiduautode kerede projekteerimisel,
ning selle peamine eesmärk on kere deformatsiooni kaudu kokkupõrke energia
vähendamine vähendades sõitjatele edastatavat energiat ja koormust. Kuid kere
projekteeritakse selliselt, et kokkupõrke puhul ei deformeeruks see
kaootiliselt vaid täpselt välja arvestatud suunas ja jõuga, neelates energiat
maksimaalse efektiivsusega. Joonis 36 hästi illustreerib kirjeldatud protsessi
kus nooltega on kajastatud kuidas kokkupõrke energia sõiduki kere kaudu jaotub
ning edasi kandub.
Joonis 35
1952.a. Bela Barenyi poolt välja töötatud peamine passiivse
turvalisuse printsiip

Allikas: Несбывшаяся
мечта Белы
Барени. 2002.
Авторевю, nr 16 (271), august
Kuigi tänapäeval
kulutatakse kerede projekteerimisele suurt majandusliku ja teadusliku
ressurssi, suudab ka kõige paremini projekteeritud kere deformeerumiseks ja
energia neelamiseks mõeldud osa summutada vaid piiratud kogus kokkupõrke
energiat. Selle tõttu üle teatud kiiruse toimuva kokkupõrke puhul ei suuda kere
„programmeeritud“ deformeerumine kogu energiat neelata ning see kandub edasi
sõiduki salongi. Kuna salongi kuju muutumine on salongis viibijate jaoks liiga
ohtlik, siis
Joonis
36
Kokkupõrke
energia jaotumine ja edasikandumine sõiduki keres Ford Focus`e näitel
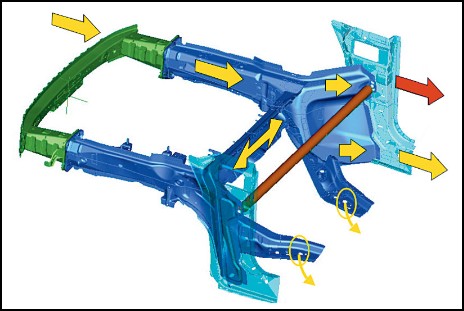
Allikas: Павел
Карин. Focus без
опасности. 2005.
Авторевю, nr 3 (328), veebruar
sõiduki salongi
osa projekteeritakse vastupidi äärmiselt tugevaks, et see ei neelaks energiat
deformeerumise kaudu vaid kannaks seda edasi sõiduki salongis olijate peale,
kus edasi tegelevad selle kustutamisega turvavööd, turvapadjad, peatoed ja muud
passiivsed turvaelemendid. Lisaks sellele, et deformeeruv kere osa suudab
neelata vaid teatud kogus energiat, on kerel ka selliseid piirkondi kus sisuliselt
puudub deformeeruv osa (nt sõiduki külg). Sellistes kohtades peab kere olema
eriti tugev kandmaks pea kogu energiat edasi seda vähendamata. Selliseid kere
omadusi (mõnes kohas eriti tugev, mõnes kohas oluliselt pehmem) saavutatakse
kere ehituses erinevate materjalide kasutamise kaudu. Joonisel 37 on toodud
Volvo XC60 kere mille peal on välja toodud erineva tugevusega materjalide
kasutamine erinevates kere osades.
Joonis 27
Volvo XC60 kokkupõrke energiat neelav ja edasi kandev kere

Юрий
Ветров.
Спокойствие,
только
спокойствие!
2008. Авторевю, nr, 20 (413),
oktoober
Käesoleva töö läbi
lugedes võib selle lugejale jääda mulje, et tänapäeva sõidukid on tehtud nii
turvaliseks, et uue sõiduki soetamisel tagab see sõitjale ja tema kaaslastele
absoluutset kaitset sõltumata juhist. Paraku ei ole see nii. Nagu ka töö
sissejuhatuses mainitud oli, on Eestis alates taasiseseisvumisest
liiklusõnnetuste arv kasvanud kiiremini kui riigi autopark ning seda vaatamata sellele,
et iga aastaga muutusid sõidukid aina uuemateks ning olid varustatud uute,
liiklusõnnetust vältida aitavate süsteemidaga. Tõsi küll, alates 2006.a. on
Eestis vähenenud nii liiklusõnnetuste, nendes viga saanute kui ka hukkune arv
(vt tabel 1), kuid ka need numbrid annavad piisavalt alust väita, et sõidukite
turvasüsteemid ei ole piisavad, et tagada nendes sõitjatele piisavalt ohutust. Seega
peaksid liiklejad tagama selle endale ise.
Tabel
1
Eestis
aastatel 2006...2009 toimunud liiklusõnnetuste ning nendes viga saanute ja
hukkunute arv.
|
|
Liiklusõnnetused
|
Vigastatud
|
Hukkunud
|
|
|
2006.a.
|
2585 tk
|
3508 tk
|
204 tk
|
|
|
2009.a.
|
1499 tk
|
1919 tk
|
100 tk
|
|
|
Vähenenud
|
42,01%
|
45,30%
|
50,98%
|
|
Autojuht peab
mõistma, et sellised elektroonilised süsteemid nagu ABS, BAS, ESP jt ei välista
sõiduki liiklusõnnetusse sattumist. Kõik need süsteemid alluvad füüsika
seadustele ning saavad parandada autojuhi vigu vaid teatud piirini. Erinevalt
levinud arvamusest, ABS ei lühenda pidurdusteekonda. Selle eesmärk on sõiduki
juhitavuse säilitamine ekstreemsel pidurdamisel andes juhile teoreetilise
võimaluse takistuses mööda sõita. ESP süsteemi abivõime on piiratud sõiduki
rataste haardevõimega, mille tõttu on selle abi jäisel teel pea olematu. BAS
süsteem küll võib teatud olukorras oluliselt lühendada pidurdusteekonda, kuid
samas peab juht arvestama, et sõiduki pidurdusteekond on ruutsõltuvuses sõiduki
kiirusest, mis tähendab, et kiiruse suurendamisel kahekordselt, suureneb
pidurdusteekond neljakordselt. Seega tuleb autojuhil kiiruse valikul lähtuda
mitte nende süsteemide olemasolust sõidukil, vaid tee olukorrast, ilmastikust,
enda füüsilisest seisundist, kehtestatud kiirusepiirangust ning enda oskustest.
Enne sõidu
alustamist peaks iga juht sõitu ette planeerima ning valima parima aja selle
tegemiseks. Pimedal ajal toimub kuni 50% surmaga lõppevatest
liiklusõnnetustest kuigi 75% sõitudest toimub valgel ajal.
Selline statistika peaks juhti mõtlema panema sellele, kas pimedaks ajaks
planeeritud sõitu on võimalik teha ka valgel ajal. Öössõidu abisüsteemid küll
osaliselt lahendavad piiratud nähtavuse probleemi, kuid ükski süsteem ei suuda
parandada asjaolu, et päeva lõpupoole ning öösel on inimese füüsiline võime
oluliselt langenud võrreldes päevase ajaga. Sellest tulenevalt on juhi
reaktsiooni võime õhtusel ja öisel ajal oluliselt madalam ning liiklusõnnetuse
vältimiseks ei pruugi öösõidu abisüsteemist abi olla.
Abi ei pruugi
olla ka töö peatükis 1.1.8 kirjeldatud Pre-Safe ja CMS liiklusõnnetuse
süsteemidest kuna nende eesmärk on eeskätt heliga ja turvavöö vibamisega suunata
juhi tähelepanu tekkivale või tekkida võivale ohtlikule olukorrale. St on ka
nende süsteemide eesmärk paranda juhi vigu ehk kompenseerida juhi
tähelepanematust. Sõiduki juhtimisel peaks autojuht hoiduma igasugustest
tegevustest mis segavad füüsiliselt auto juhtimist või olukorra õiget hindamist
ja otsuste vastuvõtmist. Sellisteks tegevusteks on nt mobiiltelefoniga
rääkimine (kuigi „käed vaba“ süsteemi kasutamisel ei ole mobiiltelefoniga
rääkimine sõidu ajal Eestis keelatud, ei soovita töö autor seda siiski teha),
heliplaatide otsimine (kui sõidukis on teisi reisijaid, on alati mõistlik
paluda kellelgi teisel leida vajalik plaat), kaardi ja raamatute lugemine, tee
ääres olevate vaatamisväärsuste vaatamine jne. Isegi rääkimine kaasreisijatega
oluliselt vähendab juhi reageerimisvõimet ning juht peab sellega arvestama.
Töö erinevates
peatükkides on töö autor tahtlikult korduvalt kirjutatud sellest, et sõiduki
turvavööd ja turvapadjad töötavad vaid koostöös ning moodustavad ühtset
süsteemi. Sellise kordamise eesmärk on suunata lugeja tähelepanu sellele asjaolule
ning rõhutada, et turvavööd on esmane salongisisene kaitsesüsteem ning kõik
teised süsteemid vaid täiendavad seda. Turvapatjade olemasolu sõidukis ei
vabasta mitte mingil määral turvavööde kasutamisest. Seda kinnitavad ka töö
lisas 2 toodud graafikud. Kuid turvavöö peale panek ei taga sõitjale automaatselt
maksimaalset kaitset. Turvavöös oleva potentsiaali täielikuks ära kasutamiseks
peab turvavöö olema õigesti ja turvaliselt peale pandud. Kuigi töö peatükis
1.2.2.b on põhjalikult kirjeldatud turvavööde eelpingutid ja nende eesmärgid,
on ka nende abi väga piiratud. Külmal aastaajal, kui inimesed kannavad pakse riideid
ning eriti veel pikki mantleid, mida istudes tõstetakse ülespoole ning
volditakse vöö kohas mitmekordselt kokku, peab turvavöö kasutaja kinnitama
selle nimetatud riiete alla mitte nende peale. Selline vajadus on tingitud
asjaolust, et turvavööde eelpingutid suudavad pingutada turvavööd vaid 15 cm
või 6 tolli võrra.
Seega on eelpingutitest vähe kasu kui talviseid riideid kasutades kinnitatakse
turvavööd riiete peale, kuna sellised riided on piisavalt paksud, et kogu keha
pikkuse ulatuses oleks turvavöö lõtk oluliselt suurem kui nimetatud 15cm.
Samal põhjusel on
suures ohus pool pikali sõita armastavad autojuhid ja nende kõrvalistujad.
Ühelt poolt on oht seotud sellega, et tavaliselt on aknapoolsed turvavöö otsad
kinnitatud esiukse järgse posti külge, ning pool pikali asendis olles on tavaliselt
inimese rind sellest postist tagapool mille tõttu ka õigesti paigaldatud
turvavöö ja inimese vahele jääb vaba ruum mis on ohtlik. Teiselt poolt on oht
seotud sellega, et pool pikali asendis olevat inimest ei suuda turvavöö
kokkupõrke puhul kinni hoida ning inimene nihkub turvavöö alumise rihma alla saades
tõsiseid jala ja selgroo vigastusi. Kolmandalt poolt, ei suuda sellises iste
asendis iste tagada selles istujale kaitset tagant otsasõidu puhul (vt töö
punkti 1.2.4). Sama oht varitseb ka koolilapsi ja teisi inimesi, kes istuvad
autosse seljakotti seljast maha võtmata.
Kõik töö
peatükis 1.1 kirjeldatud aktiivsed turvaseadmed on suunatud juhtide vigade
parandamisele ning peatükis 1.2 kirjeldatud passiivsed turvaseadmed on suunatud
nende vigade tagajärgede leevendamisele. Seega tegemist on vaid abistavate
seadmetega süsteemis, kus peamiseks riskifaktoriks on inimene kas siis autojuhi
või kaasliikleja näol. Selle tõttu peab inimene iga kord sõidukisse istudes
endale aru andma, et tema ja teiste kaasliiklejate turvalisuse tagamine on
eelkõige tema enda, mitte sõiduki elektrooniliste ja mehaaniliste süsteemide
teha.
1.
Smart Belt. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/seatbelts/smart+belt
(12.03.2010)
2.
A history of the future of safety. http://www.euroncap.com/files/euroncap_history---d7e9ac87-c4bd-4a7f-90fd-88b2bcf4da8d.pdf
(12.03.2010)
3.
About FIA. http://www.fia.com/en-GB/the-fia/about-fia/Pages/AboutFIA.aspx
(13.03.2010)
4.
About TRL. http://www.trl.co.uk/about_trl/
(12.03.2010)
5.
About us. http://www.euroncap.com/history.aspx
(12.03.2010)
6.
Active seatbelts. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/seatbelts/active+seatbelts
(12.03.2010)
7.
Airbags. http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/Airbags
(14.03.2010)
8.
Anti Lock Brake Operation and Description. http://www.2carpros.com/how_does_it_work/abs.htm
(06.03.2010)
9.
Anti-Whiplash Seat. http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/Anti-Whiplash%20Seat
(17.03.2010)
10. Door Mounted Inflatable Curtain. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/side-impact+airbags/dmic
(15.03.2010)
11. EasyFix. http://www.maxi-cosi.com/gb-en/carseats/baby/easyfix
(14.03.2010)
12. Eesti
Maanteeamet. 2009. Liiklusõnnetused kuude lõikes 1999- 2009. http://www.mnt.ee/atp/?id=41915 (19.03.2010)
13. Eesti
Maanteeamet. Aastaraamat 2008. 62 lk.
14. FAQ. About Euro NCAP. http://www.euroncap.com/Content-Web-Faq/b012b7f3-44f9-4755-94f9-a8642fd1402a/about-euro-ncap.aspx
(13.03.2010)
15. Ford introduces industry`s first inflatable seat belts to enhance
rear seat safety. www.ford.com (12.03.2010)
16. Ford's Inflatable Safety Belts. http://www.youtube.com/watch?v=MN5htEaRk4A&feature=related
(12.03.2010)
17. Frontal Airbags. http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/Airbags/Frontal%20Airbags
(14.03.2010)
18. Gen-activiteit in mensen met overgewicht anders dan in mensen met
een normaal gewicht. http://www.tno.nl/content.cfm?context=overtno&content=persbericht&laag1=37&item_id=200812160064&Taal=1
(12.03.2010)
19. Head Thorax Bag. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/side-impact+airbags/head+thorax+bag
(15.03.2010)
20. Honda LKAS. Le Moniteur Automobile. http://www.letelegramme-auto.com/honda-lkas-article-661.htm
(06.03.2010)
21. Inflatable Curtain. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/side-impact+airbags/inflatable+curtain
(15.03.2010)
22. Introduction to Autoliv. www.autoliv.com
(12.03.2010)
23. Isofix. http://en.wikipedia.org/wiki/LATCH
(15.03.2010)
24. Kontakt. http://www.bast.de
(12.03.2010)
25. L’UTAC, une entreprise de services. http://www.utac.com/fr/utac/entreprise/Pages/default.aspx
(12.03.2010)
26. Lower Body Protection. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/frontal+airbags/lower+body+protection
(12.03.2010)
27. Lower Body Protection. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/frontal+airbags/lower+body+protection
(14.03.2010)
28. Mercedes E
4MATIC: дважды
два четыре. 1997.
Авторевю, nr 6 (145), märts
29. Nachtsicht Assistent. www.mercedes-benz.com
30. Norma.
www.norma.ee (12.03.2010)
31. Pre-Safe System. www.mercedes-benz.com (08.03.2010)
32. Pretensioners. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/seatbelts/pretensioners
(12.03.2010)
33. Product Presentation. Night Vision System. http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/
(19.03.2010)
34. Product Presentation. Pretensioners. http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/
(12.03.2010)
35. Seat belt http://en.wikipedia.org/wiki/Seat_belt#History
(06.03.2010)
36. Side-Impact Airbags. http://www.autoliv.com/wps/wcm/connect/autoliv/Home/What+We+Do/Airbags/Side-Impact%20Airbags
(15.03.2010)
37. SplitVeiw. www.mercedes-benz.com (08.03.2010)
38. Tallinna
Tehnikakõrgkool. 2009. Veapunktisüsteemi rakendamise vajalikkus ja oodatav mõju
Eesti liiklusohutusele. Tallinn. 72 lk.
39. Thorax Bag. http://www.autoliv.com/wps/wcm/connect/autoliv/home/what+we+do/airbags/side-impact+airbags/thorax+bag
(15.03.2010)
40. What is in a seat?
http://www.i-car.com/html_pages/technical_information/advantage/advantage_online_archives/2004/092704.shtml
(17.03.2010)
41. What is the motorcycle Airbag System? http://www.world.honda.com/motorcycle-picturebook/Airbag/
(06.03.2010)
42. Александр
Воронцов.
АБС: тормози -
не упадешь! 2000.
Мото, nr 12, detsember
43. Александр
Воронцов.
Правим
бритвы,
взбиваем
подушки! 2005. Motor, nr 11, november
44. Антиблокировочная
система (АБС, ABS).
http://www.avariya-ili-ugon.ru/antiblokirovochnaya-sistema-abs-abs.htm (06.03.2010)
45. Антипробуксовочная
система. http://systemsauto.ru/active/asr.html (06.03.2010)
46. Безопасная
инициатива. 2005.
Авторевю, nr 21 (345), oktoober
47. Дмитрий
Юдин. На
чужом поле. 2009.
Мото, nr 07, juuli
48. Дмитрий
Юдин. Фаворит
супербайка. 2009.
Мото, nr 01, jaanuar
49. "Дублер"
под капотом. 1999.
Авторевю, nr 5 (192), märts
50. Игорь
Владимирский.
Рейтинг
безопасности
EuroNCAP. 2008. Авторевю, nr 1
(395), jaanuar
51. Илья
Хлебушкин.
Приключения
«итальянца»
из России. 2009.
Авторевю, nr 21 (437), november
52. К. Максимов.
«Мыслящие»
подушки
безопасности.
2000. Авторевю, nr 18 (227),
juuli
53. Крепление ISOFIX.
http://www.avtodeti.ru/?t=43&s=140 (14.03.2010)
54. Леонид
Голованов.
Анатомический
театр. 2002. Авторевю,
nr 13-14 (269), juuli
55. Леонид
Голованов.
Власть машин.
2003. Авторевю, nr 21 (299),
november
56. Леонид
Голованов.
Триумфальная
площадь. 2002.
Авторевю, nr 23 (278),
detsember
57. Максим
Кадаков. Renault
делает умную
подушку. 1997. Авторевю,
nr 12 (151), juuni
58. Михаил
Подорожанский.
Аксидентология.
2002. Авторевю, nr 12 (268),
juuni
59. Наталья
умнова. С
персональной
подушкой. 2005.
Мото, nr 3, märts
60. Несбывшаяся
мечта Белы
Барени. 2002.
Авторевю, nr 16 (271), august
61. Олег
Растегаев.
Детское
место. 2007.
Авторевю, nr 11 (382), juuni
62. Особенности
установки
детских
автокресел с
помощью
штатных
ремней
безопасности
автомобиля. http://www.detiavto.info/ustanovka-detskih-avtokresel-shtatnymi-remnjami-bezopasnosti
(06.03.2010)
63. Павел
Карин.
Фабрика
звезд. 2005.
Авторевю , nr 23 (247),
detsember
64. Павел
Карин.
Эпицентр
безопасности.
2005. Авторевю, nr 19 (343),
august
65. Павел Карин.
Focus без
опасности. 2005.
Авторевю, nr 3 (328), veebruar
66. Принцип
работы ESP. http://avtospletni.ru/technology/126-princip-raboty-esp.html (06.03.2010)
67. Система
крепления
детских
автокресел LATCH. http://www.babysale.ru/ncd-1-1-110/news.html (14.03.2010)
68. Система
распределения
тормозных
усилий.
http://systemsauto.ru/active/ebd.html (07.03.2010)
69. Системы
активной
безопасности.
http://systemsauto.ru/active/active.html (06.03.2010)
70. Электронная
система
распределения
тормозного
усилия (EBD). http://www.avariya-ili-ugon.ru/elektronnaya-sistema-raspredeleniya-tormoznogo-usiliya-ebd.htm (07.03.2010)
71. Юбилей
подушки. 2005.
Авторевю, nr 22 (346), november
72. Юрий
Ветров.
Безопасность
будущего. 2006.
Авторевю, nr 11 (359), juuni
73. Юрий
Ветров.
Берегите шею!
2009. Авторевю, nr 4 (421),
märts
74. Юрий
Ветров.
Звезда
безопасности.
2009. Авторевю, nr 06 (423),
märts
75. Юрий
Ветров.
Отворот. 2007. Авторевю,
nr 22 (392), oktoober
76. Юрий
Ветров.
Отвязанные. 2007.
Авторевю, nr 2 (373), jaanuar
77. Юрий
Ветров.
Самоуправство.
2007. Авторевю, nr 16 (386),
august
78. Юрий
Ветров.
Спокойствие,
только
спокойствие!2008.
Авторевю, nr 20 (413), oktoober